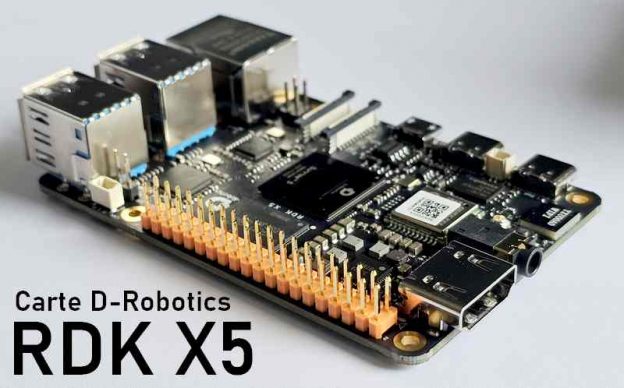
La carte RDK X5, développée par D-Robotics, est une plateforme puissante et compacte compatible avec l’IA, conçue pour les applications robotiques et basées sur la vision. Basée sur un Sunrise 5 développé par D-Robotics et équipée d’une caméra stéréo, elle est préchargée avec ROS 2 et une suite d’outils qui la rendent idéale pour le prototypage de fonctionnalités robotiques avancées, du simple streaming d’images à la détection faciale complexe et à la reconstruction 3D.
Dans cet article, je partage mon expérience pratique de la configuration de la carte, du test de différentes configurations de caméra et de l’exécution de la détection des points de repère faciaux en temps réel. L’objectif est de fournir un guide pratique aux développeurs, aux fabricants et aux éducateurs qui souhaitent explorer le potentiel de la carte dans les environnements ROS 2.