
Au sommaire :
Détecteur de présence infrarouge PIR
Présentation
Un capteur PIR (Passive InfraRed sensor = Capteur infrarouge passif) utilise l’effet Pyroélectrique. La pyroélectricité (du pyrus grec, du feu et de l’électricité) est la propriété de certains cristaux qui sont naturellement polarisés électriquement , et ont la capacité de générer une tension lorsqu’ils sont chauffés ou refroidis. Le changement de température modifie légèrement la position des atomes à l’intérieur de la structure cristalline, de sorte que la polarisation du matériau change. Ce changement de polarisation provoque une tension à travers le cristal. Si la température reste constante à sa nouvelle valeur, la tension pyroélectrique disparaît progressivement à cause du courant de fuite. (Wikipedia)
Le capteur est dit passif car il n’y a pas de diode infrarouge pour éclairer la zone de détection, le capteur fonctionne de façon autonome.
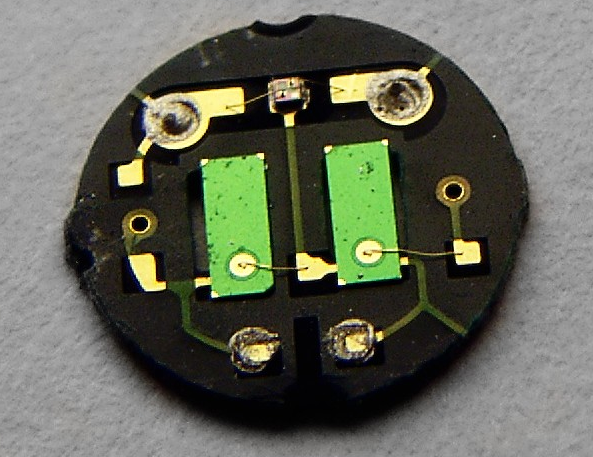
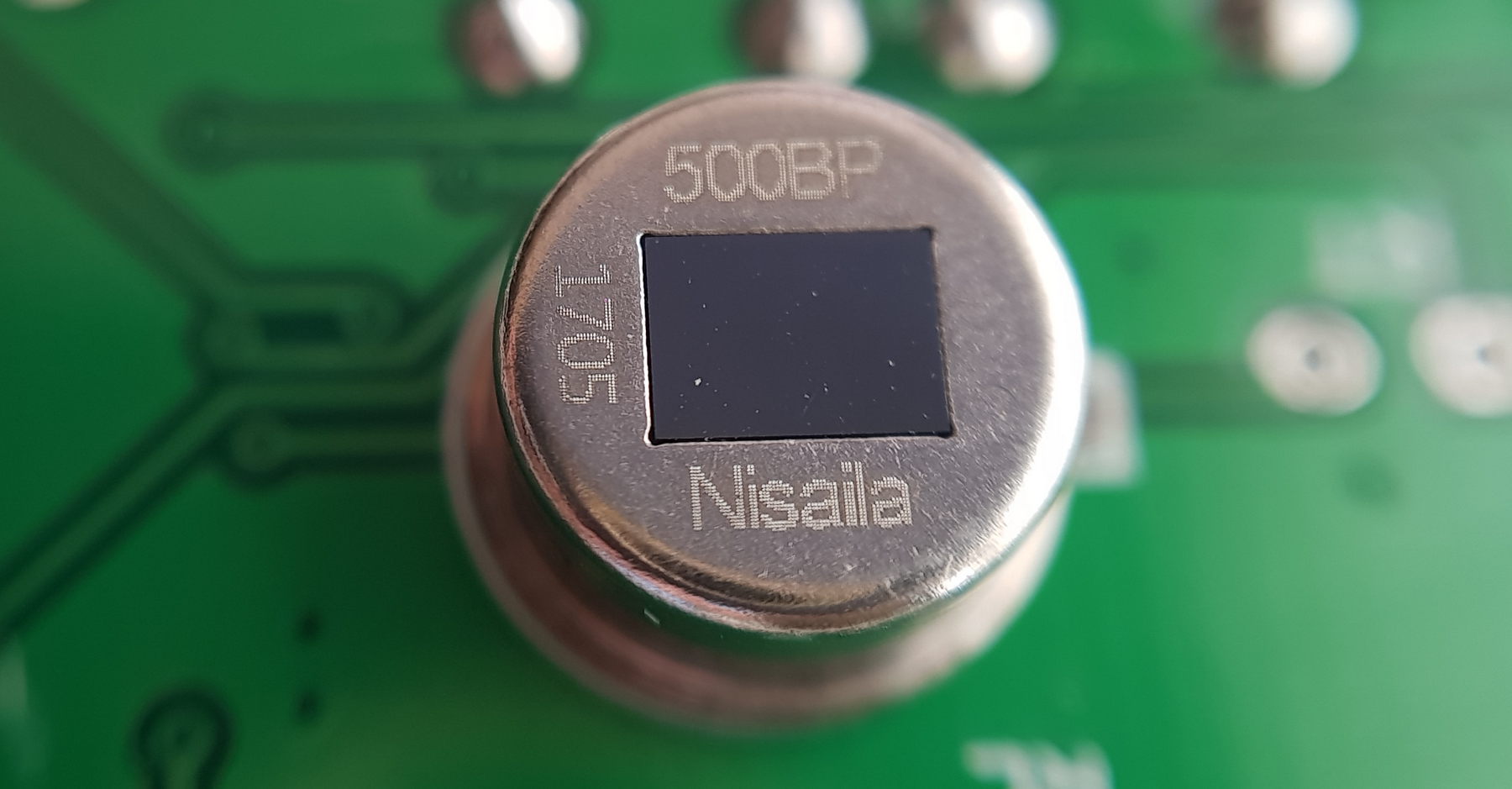
Sur l’image ci-dessus, représentant un capteur Pyroélectrique démonté, on voit distinctement les deux plaquettes du détecteur.
Principe de la détection
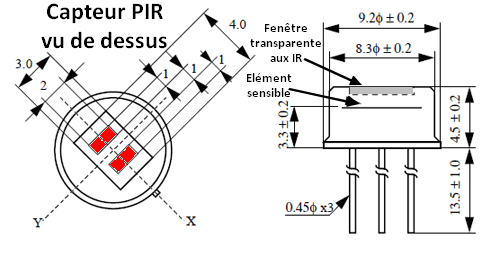
Vu de dessus, le capteur monté dans son boîtier a une forme circulaire. Une fenêtre bloque la lumière visible et laisse passer le rayonnement infrarouge vers les deux plaquettes à effet pyroélectrique (en rouge sur la vue de dessus). Sur le schéma situé à droite, on voit le boîtier cylindrique et les broches de connexion. La fenêtre infrarouge est représentée en gris. Elle se trouve au dessus de l’élément sensible, comportant les deux plaquettes pyroélectriques.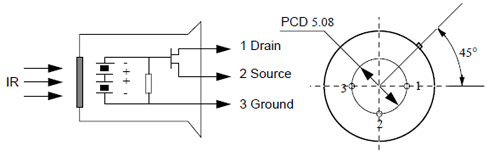
Représentation schématique du capteur. Le rayonnement infrarouge arrive sur la fenêtre, la traverse et provoque une variation de tension au niveau des plaquettes pyroélectriques. Le capteur PIR est muni de deux plaquettes faites d’un matériau spécial sensible à l’IR. La fenêtre ne fait pas grand chose à part arrêter la lumière visible et laisser passer le rayonnement infrarouge.
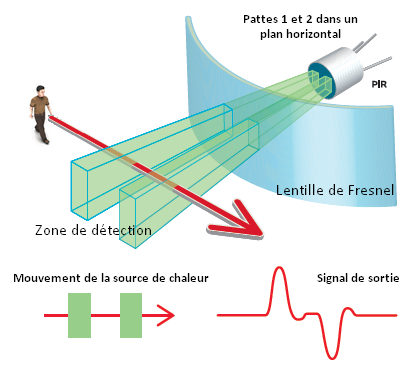
Les deux plaquettes sensibles peuvent « voir » jusqu’à une certaine distance (essentiellement liée à la sensibilité du capteur). Lorsque les deux plaquettes détectent la même quantité d’IR, le capteur est inactif. Il s’agit de la quantité d’IR ambiante rayonnée dans la pièce ou par des murs à l’extérieur. Lorsqu’un corps chaud comme un humain ou un animal passe, il modifie d’abord la quantité d’IR sur la moitié du capteur PIR, ce qui crée une différence entre les deux plaquettes du capteur et une impulsion positive. Lorsque le corps chaud quitte la zone de détection, l’inverse se produit et le capteur génère une variation négative. Ce sont ces impulsions générées lors des changements qui sont détectées.
Lentille de Fresnel
Pour améliorer la détection du capteur de base, on va utiliser une lentille pour projeter le rayonnement IR sur le capteur.
Lentille classique (loupe)
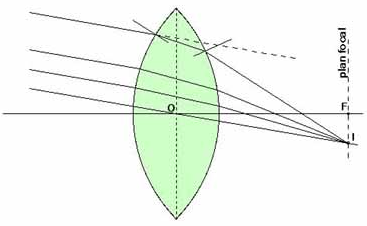 La première solution serait de placer un objectif devant le capteur, comme dans un appareil photographique. On utilise alors une lentille convexe, appelée également loupe. Les inconvénients de cet objectif sont son épaisseur et son poids (s’il est en verre).
La première solution serait de placer un objectif devant le capteur, comme dans un appareil photographique. On utilise alors une lentille convexe, appelée également loupe. Les inconvénients de cet objectif sont son épaisseur et son poids (s’il est en verre).
Principe de la lentille de Fresnel
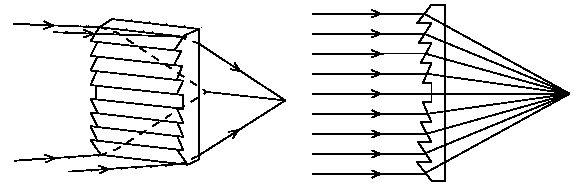
La lentille de Fresnel a été inventée par le physicien et ingénieur français Augustin Fresnel en 1822. Son idée a été de créer des zones annulaires présentant les mêmes caractéristiques que chaque partie correspondante de la loupe. On obtient alors une lentille bien plus légère et mince.
 Cette invention était destinée à remplacer les miroirs des phares qui occasionnaient d’importantes pertes de lumière (jusqu’à 50%).
Cette invention était destinée à remplacer les miroirs des phares qui occasionnaient d’importantes pertes de lumière (jusqu’à 50%).
L’allègement par rapport à des lentilles conventionnelles a permis de réaliser des phares ayant une très longue portée.
Lentille de Fresnel sur un phare – exposée au Musée National de la Marine.
La lentille de Fresnel et le PIR
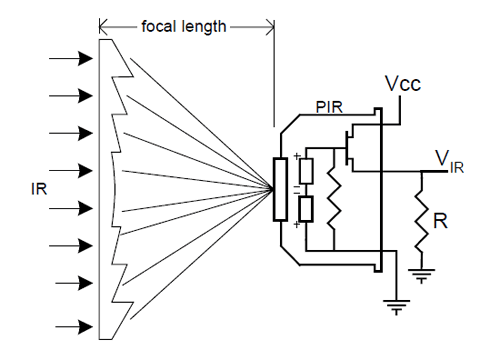
Si on place une lentille de Fresnel devant un capteur IR passif, le rayonnement IR est concentré sur le capteur et la distance de détection est améliorée. L’inconvénient qui subsiste est que la détection va se faire dans une seule direction, dans l’axe du capteur.
Lentille de Fresnel multiple
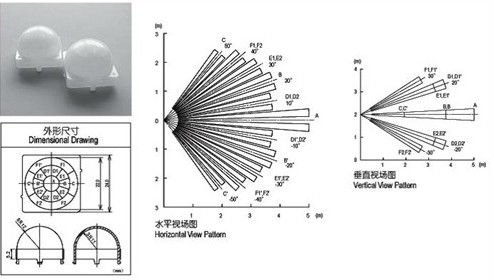
Les fabricants de capteur ont développé des lentilles de Frenel multiples, réalisés en matière plastique par moulage.

Sur cette lentille prélevée sur un détecteur PIR du commerce, on voit les différentes zones, correspondant à autant de lentilles individuelles. Chaque zone envoie l’image de sa « région » sur le capteur.

Sur cet agrandissement, on voit bien les anneaux de chaque lentille de Fresnel. Sur des modèles plus simples (et moins chers 🙂 ) comme celui que j’utilise, ce sont des lentilles classiques qui renvoient le rayon IR sur le capteur.
Champ couvert par la lentille du détecteur infrarouge PIR
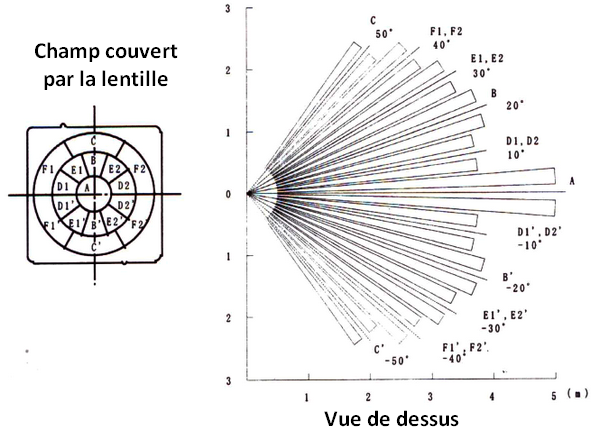
Chacune des lentilles correspond à une zone de détection. La forme sphérique de l’ensemble permet de réaliser un capteur capable de détecter un mouvement dans un angle de 100°, voir plus. L’image ci-dessus indique les zones de détection en vue de dessus, un équivalent existe pour la détection en vertical :
C’est cette multitude de zones qui fait qu’un capteur situé à 2 ou 3 mètres de hauteur (sous un projecteur extérieur par exemple) est à même de détecter une personne qui s’aventure dessous.
Schéma du module détecteur PIR HC-SR501
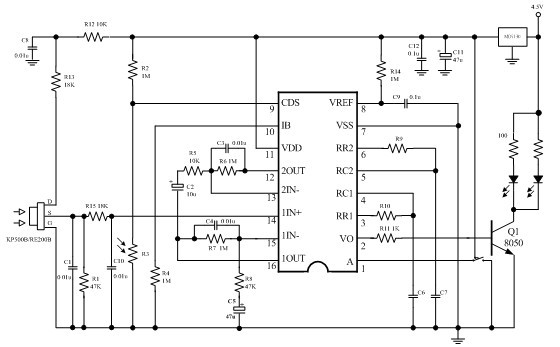
La notice technique d’un capteur IR passif fournit un schéma de mise en œuvre du capteur, avec un circuit destiné à détecter les variations et à activer une sortie. C’est en général un circuit intégré BISS0001 qui est utilisé.
Ce circuit intègre les composants nécessaires à la détection des variations fournies par le capteur. Il permet également de choisir (en déplaçant un cavalier) un mode de fonctionnement avec redéclenchement, ou sans redéclenchement.
Mode avec réenclenchement
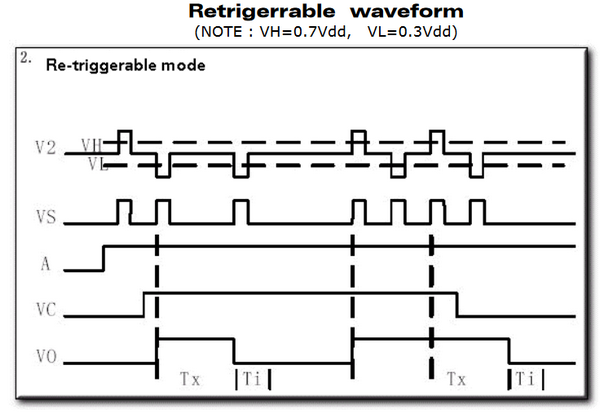
Dans ce mode de fonctionnement, lorsqu’une détection est faite par le capteur, le signal de sortie dure un certain temps Tx. Si pendant que le signal Tx est à 1 le capteur détecte un mouvement, le temps Tx est allongé. A la limite si quelqu’un bouge pendant plusieurs minutes devant le capteur, la sortie reste à 1 pendant tout ce temps.
[stextbox id=’warning’ caption=’Attention !’]A noter qu’il existe un temps Ti après la retombée de la sortie Tx à 0. Ce temps Ti est d’environ 3 secondes. C’est le temps pendant lequel le détecteur ne réagira pas en cas de nouveau mouvement détecté par le capteur (Ti = Temps d’Inactivité).[/stextbox]
Mode sans réenclenchement
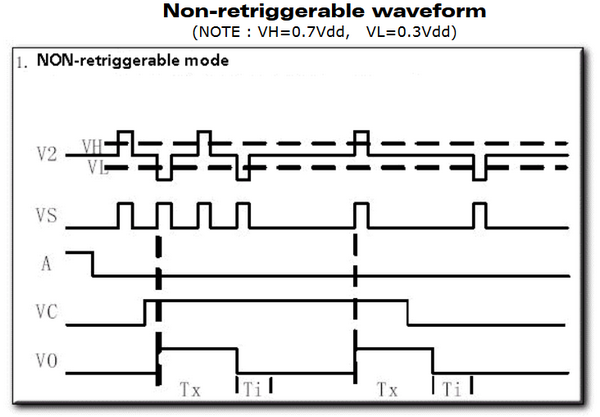
Dans ce mode de fonctionnement, lorsqu’une détection est faite par le capteur, le signal de sortie dure un temps fixe Tx. Même si pendant que le signal Tx est à 1 le capteur détecte un mouvement, le temps Tx ne sera pas allongé. Tous les créneaux Tx ont la même largeur. Si quelqu’un bouge pendant plusieurs minutes devant le capteur, la sortie passe à 1 chaque fois que le capteur détecte un mouvement, après le passage à 0 de Tx.
Choix du mode de fonctionnement
Il n’est pas possible de conseiller un mode de fonctionnement plutôt qu’un autre. Tout dépendra de l’utilisation que vous ferez du signal, donc de vos choix lors de la conception du montage.
Caractéristiques
- Tension d’alimentation : 5V – 20V
- Consommation : 65mA
- Sortie TTL : 3.3V, 0V
- Temps pendant lequel la sortie est à 1: Ajustable (3s à 5min)
- Temps de verrouillage Ti : ˜0.2 sec à 3s selon fabricant
- Déclenchement : avec redéclenchement , sans redéclenchement
- Sensibilité : moins de 120°, jusque 7 mètres
- Temperature : – 15 à +70°C
- Dimension : 32*24 mm, distance entre trous de montage 28mm, vis M2Diamètre de la lentille : 23mm
Certains détecteurs de présence PIR, notamment ceux qui équipent les projecteurs, sont munis d’une cellule photoélectrique (généralement photorésistance CdS) qui bloque le fonctionnement dans la journée, quand la lumière ambiante est suffisante. Ce n’est pas le cas de ce modèle.
Photos du module détecteur PIR
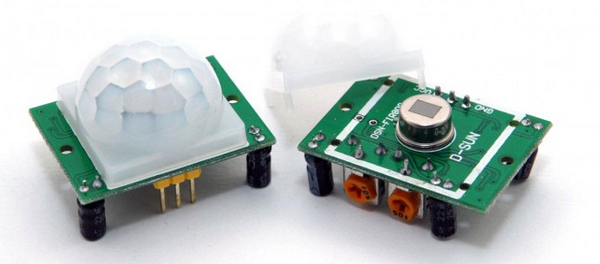
Détecteur PIR avec et sans la lentille sur le capteur.
Capteur vu dessus, sans la lentille. On ne voit que la fenêtre IR.
Cliquez pour agrandir.
Gros plan du capteur. On ne distingue pas l’intérieur du boîtier à travers la fenêtre opaque aux rayons visibles.
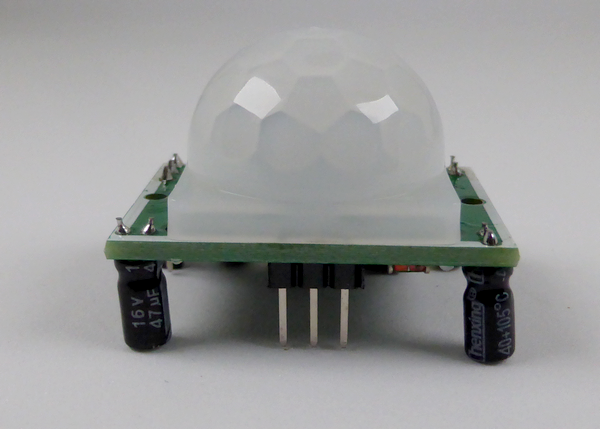
Module HC-SR501 vue côté broches.
Module HC-SR501 vue côté potentiomètres de réglage.
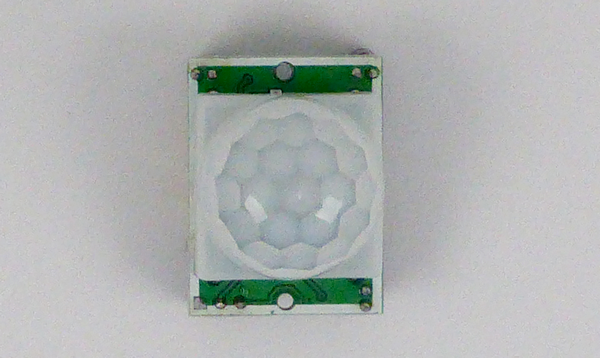
Module HC-SR501 vue de dessus. 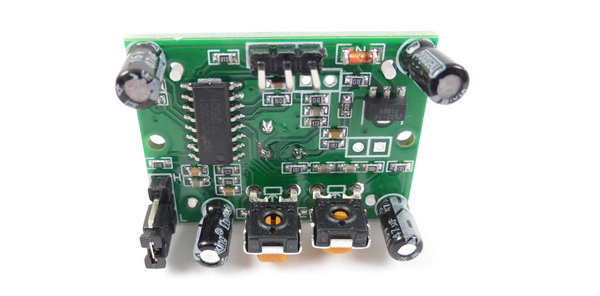
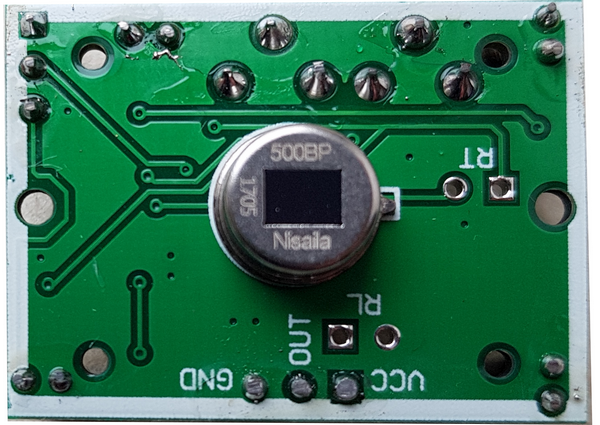
Module HC-SR501 vue de dessous.
Réglages
Cliquez pour agrandir
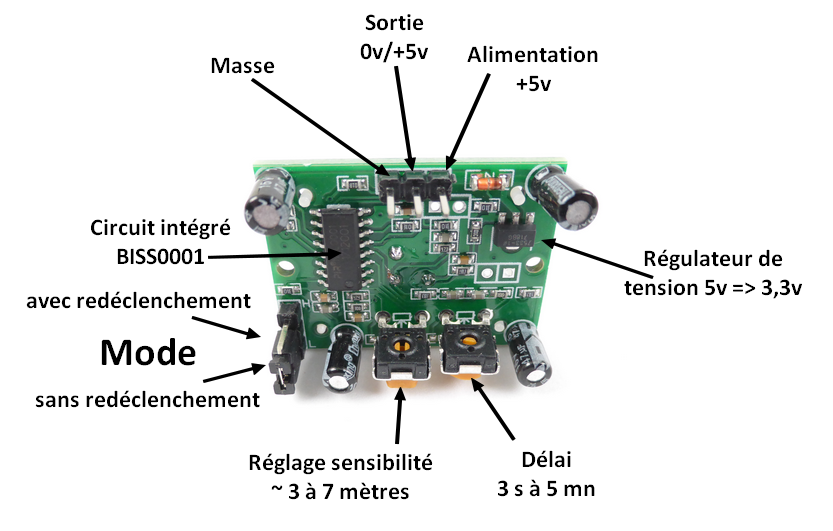
Sur cette image du détecteur de présence infrarouge HC-SR501 vu de dessous, les différents éléments sont indiqués. Pour régler le fonctionnement vous disposez d’un cavalier (jumper) pour régler le mode de fonctionnement (avec ou sans redéclenchement). Le module est alimenté en +5v, mais un régulateur de tension ramène cette tension à 3,3v. La sortie du module se fait également en 3,3v, ce qui permet de relier directement la sortie à une entrée GPIO. Si vous avez un module qui sort en 5v, reportez vous à la page sur les Résistances pour le calcul du pont diviseur à utiliser.
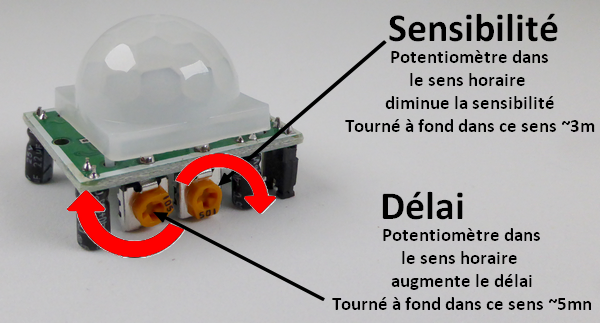
Les deux potentiomètres permettent de régler la sensibilité du détecteur et le temps pendant lequel la sortie reste à 1 en cas de détection.
Connexion au Raspberry Pi
Cliquer pour agrandir
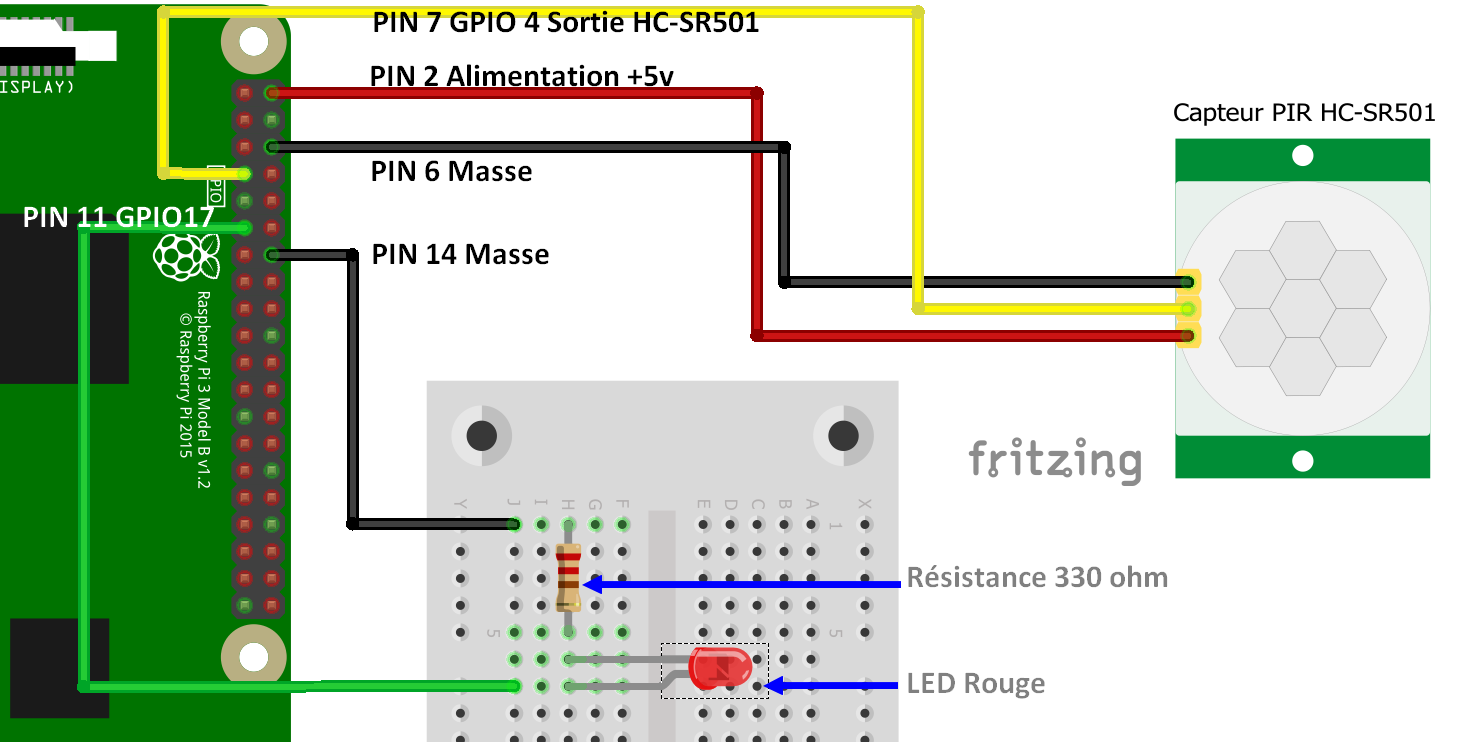
Le module HC-SR501 est connecté à l’alimentation 5v disponible sur le connecteur GPIO du Raspberry Pi. Le fil rouge amène la tension de +5v et le fil noir amène la masse. La sortie du module est reliée par un fil jaune à la broche 7 du connecteur GPIO (cela correspond au GPIO 4).
Pour visualiser le déclenchement, nous allons utiliser une LED (j’ai choisi une LED rouge). L’anode de la LED est reliée par un fil vert à la broche 11 (GPIO 17) du Raspberry Pi, sa cathode rejoint une résistance de 330Ω qui ramène le courant à la masse par un fil noir (broche 14 du connecteur).
Le programme ci-dessous vous permettra de tester le module.
Test avec Scratch
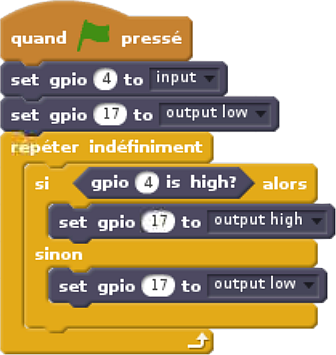
Ce programme initialise les deux ports GPIO utilisés :
- Le GPIO 4 (PIN 7) est initialisé en entrée (input)
- Le GPIO 17 (PIN 11) est initialisé en sortie et mis à zéro (output low)
Puis une boucle infinie lit le GPIO 4 en permanence (GPIO 4 is high ?). Elle allume la LED (GPIO 17 output high), et lorsque le détecteur de présente passe sa sortie à 1, quand il a détecté un mouvement. Quand la sortie du détecteur HC-SR501 repasse à 0, la LED s’éteint (GPIO 17 output low).
Vidéo
[floating_div_ps name= »menu-composants »]