

La période de Noël est propice aux achats car de nombreux sites font des réductions à cette occasion. C’est le cas d’Elecrow qui m’a envoyé sa liste de matériels en promo pour fin 2023. J’ai craqué pour cette voiture radiocommandée dont ils fournissent le châssis, équipé de roulements sur toutes les roues. Il peut recevoir Arduino ou Raspberry Pi. Quand je suis tombé dans le Raspberry Pi, j’étais en train de développer une voiture radiocommandée à base d’Arduino (l’article de 2012 est ici). Comme quoi on en revient toujours à ses premières amours… Je vous parle aussi des promos de Noël d’Elecrow et en fin d’article vous pouvez gagner quelques Goodies !
Au sommaire :
Châssis de voiture radiocommandée Elecrow pour Arduino et Raspberry Pi
 En 11 ans les choses ont bien évolué, et aujourd’hui je partirai plutôt sur un Raspberry Pi Pico avec un émetteur récepteur Flysky, acheté un jour pour un drone que je n’ai jamais fini… (Vous n’en avez pas, vous, des projets qui dorment dans des cartons??)
En 11 ans les choses ont bien évolué, et aujourd’hui je partirai plutôt sur un Raspberry Pi Pico avec un émetteur récepteur Flysky, acheté un jour pour un drone que je n’ai jamais fini… (Vous n’en avez pas, vous, des projets qui dorment dans des cartons??)
Et comme j’ai un récepteur iBus (il envoie les ordres sur un seul fil) ce sera l’occasion d’explorer ce mode de fonctionnement… Mais avec un PICO, pas avec un Arduino. On verra ça l’an prochain, pour le moment je me concentre sur la mécanique et après… ce sont les fêtes de fin d’année 😆
 |
Gagnez des Goodies en fin d’article ! |
Montage de la voiture Elecrow
Déjà une précision : sur les documents il est spécifié 4WD, or la voiture est une propulsion arrière, avec 2 roues arrière motrices. Ce n’est pas une 4 wheel drive = 4 roues motrices.
Pour le montage la page Elecrow propose une notice, je vous l’ai traduite en français…
 |
 |
Cliquez sur les images ci-dessus pour accéder à la notice.
Contenu de la boîte


La boîte que j’ai reçue contient tous les éléments nécessaires au montage, bien protégés dans un bloc de mousse découpé aux dimensions de ce qu’il protège. Le châssis de base est en aluminium ce qui garantit un belle rigidité et une bonne résistance. Les plaques supports du châssis supérieur sont en acrylique noir, protégées par un film plastique.

Un tournevis, une clé 6 pans et une clé en croix sont fournis. pour info, une des vis pointeau d’une roue dentée n’acceptait pas la clé 6 pans, j’en ai utilisé une autre. On a également les fils pour l’interrupteur, des colliers nylon et de la gaine.
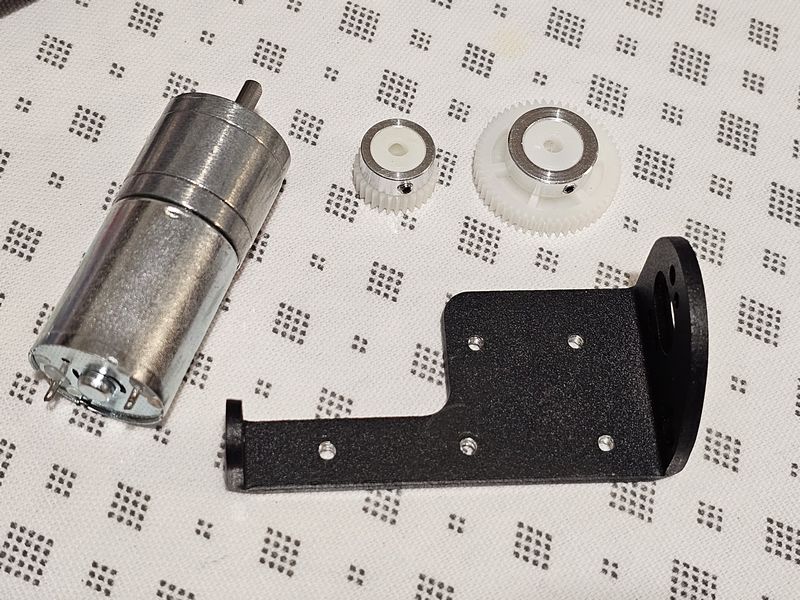
Le moteur et son support, ainsi que les roues dentées pour la démultiplication.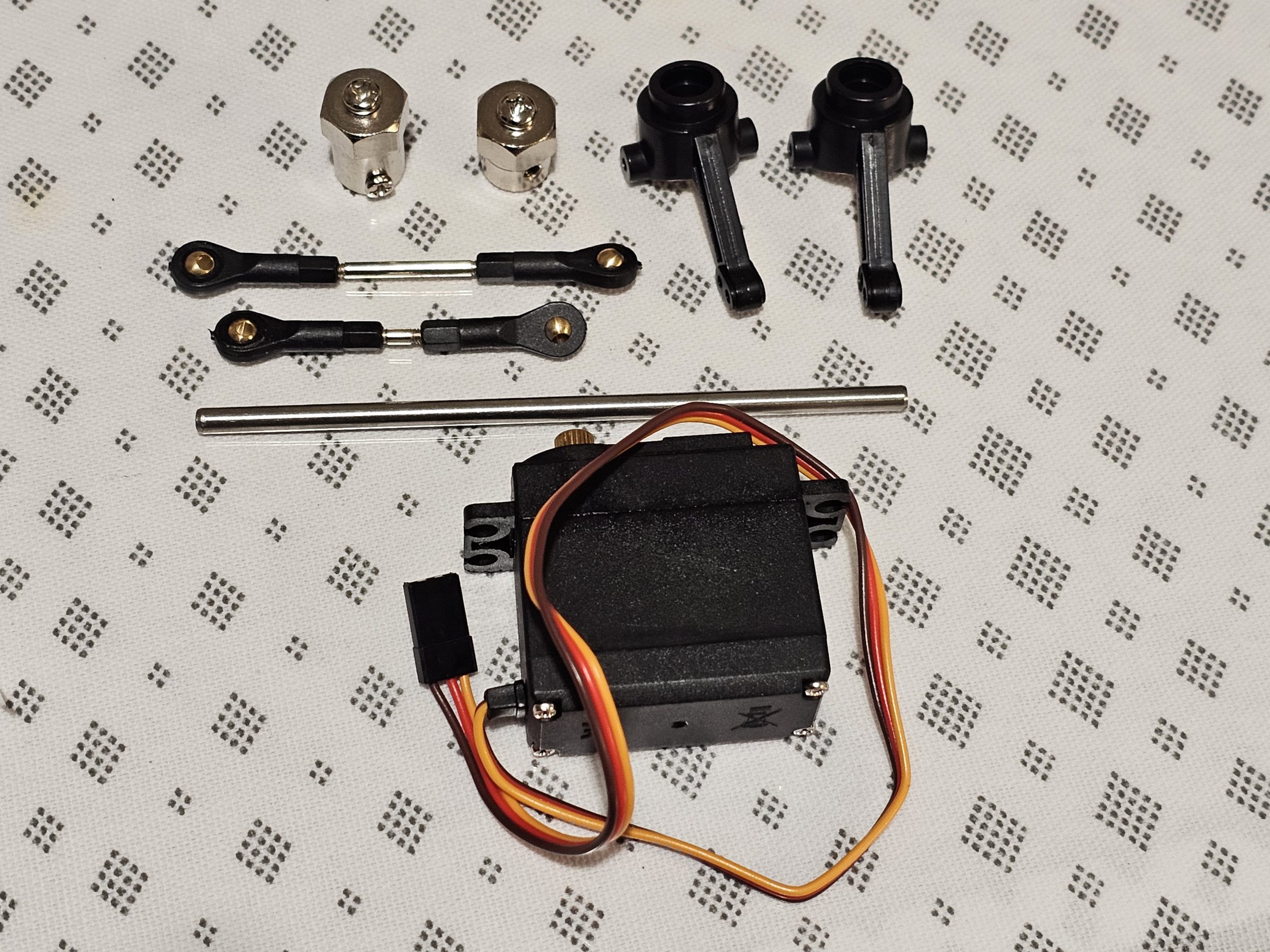
En haut les manchons hexagonaux pour les roues arrière et les coupelles de direction. Les biellettes de direction classiquement équipées de boules pour leur permettre de se déplacer en toutes directions. L’axe moteur des roues arrière et enfin un servomoteur de direction de type MG996R (15Kg/cm) bien adapté pour cette fonction. Le MG996R est robuste et dispose de pignons et roulements métalliques. Il offre d’un couple de 15Kg/cm et est très utilisé dans les domaines de la robotique, modélisme, domotique…

Les petites pièces sont fournies dans des sachets séparés. Comme toujours chez Elecrow, il y a souvent un peu de pièces supplémentaires (qui n’a jamais fait tomber une vis ?)

Le moteur est de type JGA25-370, petit moteur courant continu à basse vitesse et couple élevé, équipé d’un motoréducteur. Le point rouge indique le pôle positif. Le moteur est fourni non câblé, il faudra souder les fils dessus (avec un morceau de gaine thermorétractable en protection) ou utiliser des petites cosses adaptées.
« Direction of rotation of the motor: CW Or CCW, Support Reversed; Control the clockwise or counterclockwise rotation of the motor by changing the way the positive and negative electrodes are connected » : La notice en anglais indique qu’il ne faut inverser la tension, mais le moteur accepte la tension inverse et on pourra donc faire rouler la voiture en marche arrière si on l’équipe d’un pont en H genre L298…
Montage des roues avant

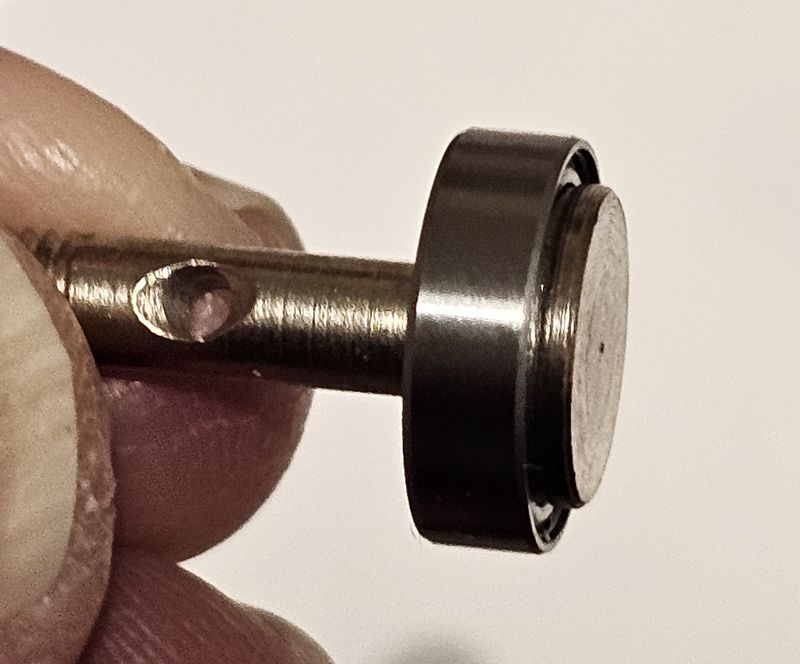
Passez l’axe de roue avant dans le plus grand roulement

Le roulement doit être positionné bien parallèle à l’intérieur de la coupelle et rentré à force. En fait j’ai d’abord mis le roulement en place dans la coupelle (en tapant dessus avec un maillet et un cylindre à la bonne taille) puis j’y ai glissé l’axe.

Le petit roulement vient se placer de l’autre côté de la coupelle. L’axe est alors maintenu entre les deux roulements et tourne facilement.

Placez la goupille dans le trou de l’axe, elle doit être bien centrée
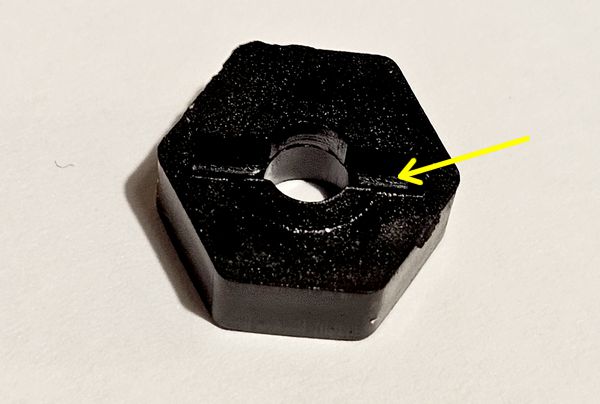
L’adaptateur hexagonal a une encoche pour recevoir la goupille
Une fois en place il couvre complètement la goupille

Mettez l’adaptateur en place dans le centre de la roue, trou pour la goupille vers l’extérieur,


Puis mettez l’axe dans l’adaptateur hexagonal en veillant bien au positionnement de la goupille

On termine le montage en vissant l’écrou nylstop (bloquant) à l’extérieur de la roue. Faites tourner la roue, elle doit tourner librement grâce aux deux roulements.
Montage de la direction
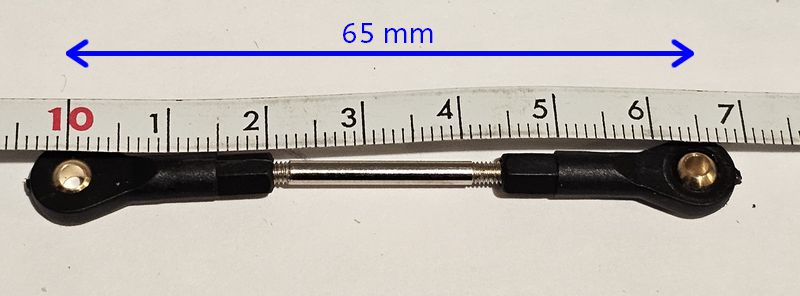
Préparez la biellette longue, régler l’écartement des trous à 65mm. Pour la petite biellette, l’écartement sera de 45mm.

Montez la grande biellette sur les bras des coupelles, utilisez le trou le plus éloigné de la coupelle. Les vis 2,5mm se vissent dans le plastique de la biellette.


Montez ensuite la biellette coute sur la roue droite, dans le trou le plus proche de la coupelle.
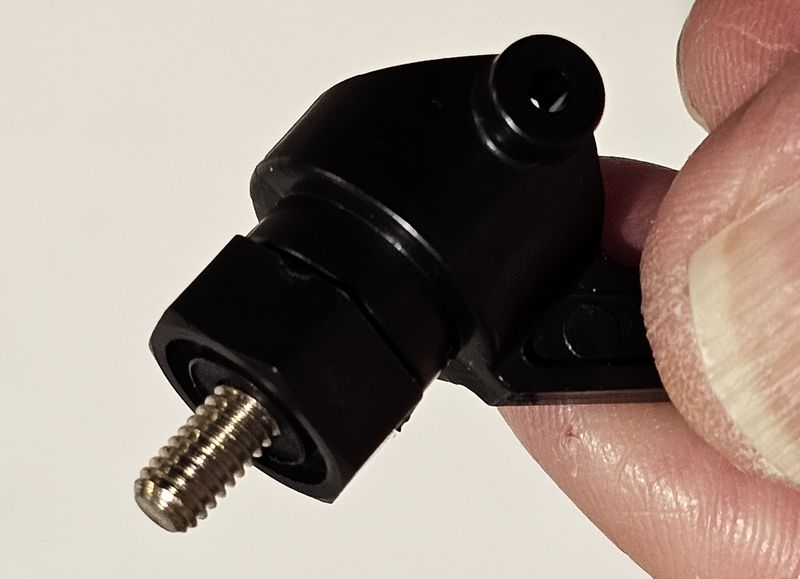
Le servomoteur MG996R est monté sur 2 équerres comme sur la photo ci-dessus. Avant de procéder à son montage, il faut le prérégler à 90° en vous aidant du programme fourni. Si vous devez le faire plus tard, il faudra le démonter, ce qui n’est pas pratique…
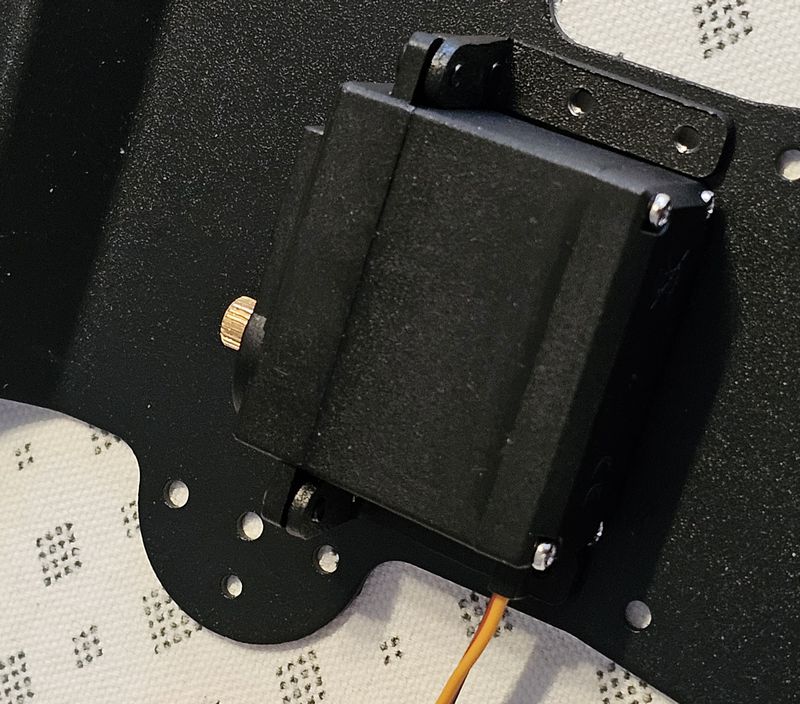

Montez le servo moteur positionné à 90° sur le châssis.
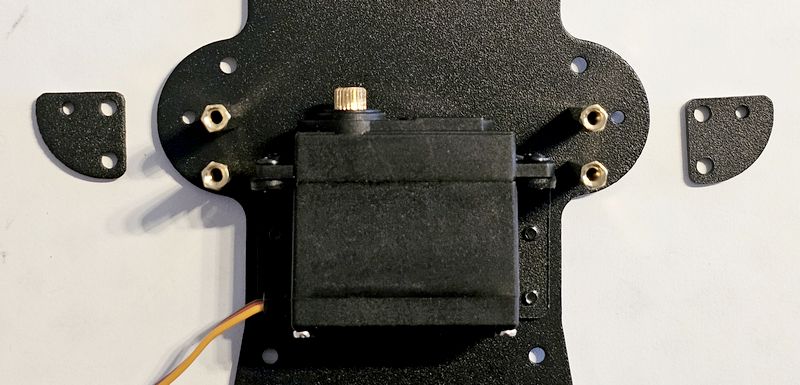
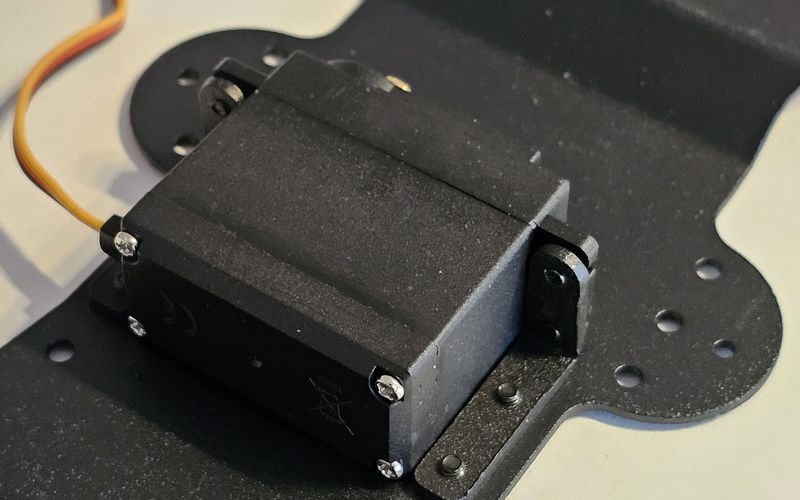
Montez de chaque côté deux entretoises et les deux plaquettes de maintien des coupelles. Les vis (prépositionnées ici dessus) viendront se visser dans les coupelles, ne pas serrer à fond pour permettre aux coupelles de direction de pivoter sous l’action du servomoteur.

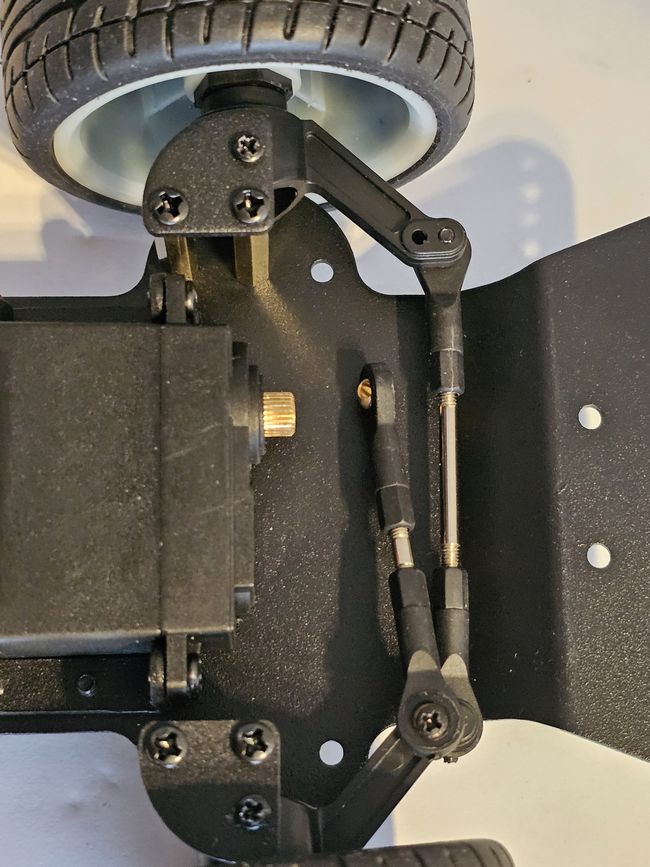

Monter les coupelles de chaque côté de la voiture. Vérifier que la rotation du train avant est correcte. Vous pouvez maintenant placer le bras du servo et fixer la billette courte dessus.
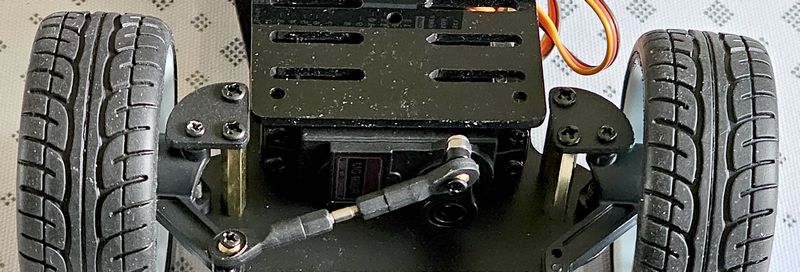
Lorsque le servo se déplacera à gauche et à droite, il entraînera les roues avant.
Le programme de test pour mettre le servo à 90°
#include
// Définition de l'objet servo
Servo myservo;
void setup() {
// Connecter le servo à la broche numérique 9.
myservo.attach(9);
}
void loop() {
// Augmenter progressivement l'angle du servo
for (int angle = 0; angle <= 180; angle += 1) { myservo.write(angle); delay(15); } delay(1000); // Attendre 1 seconde. // Réduire progressivement l'angle du servo for (int angle = 180; angle >= 0; angle -= 1) {
myservo.write(angle);
delay(15);
}
delay(1000); // Attendre 1 seconde.
}
// Mettre le servo à 90°
for (int angle = 0; angle >= 90; angle += 1) {
myservo.write(angle);
delay(15);
}
Montage du moteur et train arrière
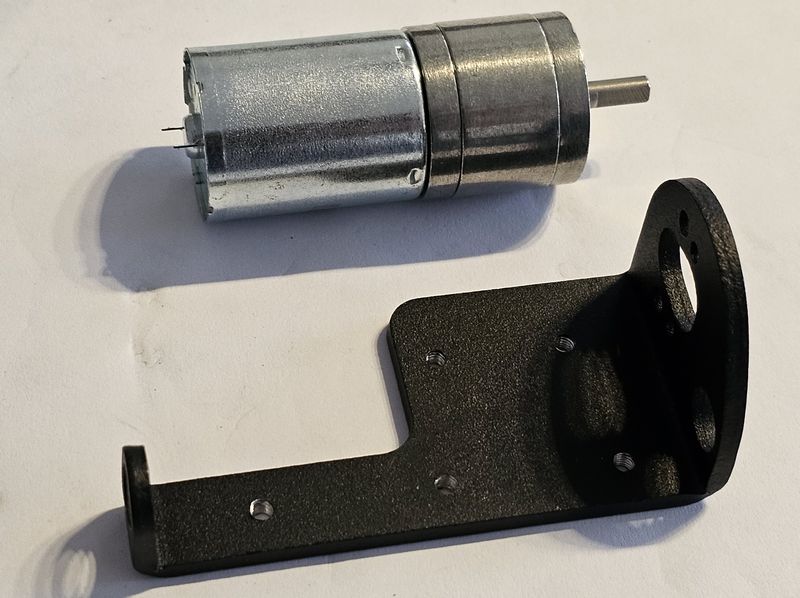
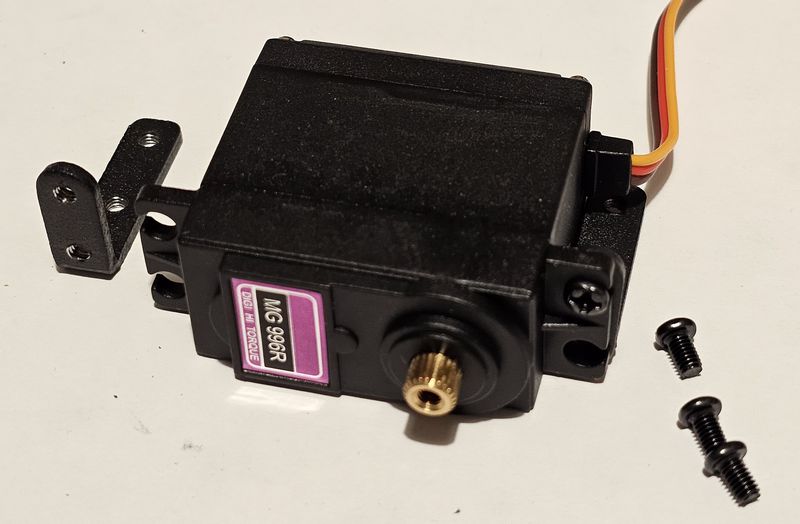
Préparer le moteur et son support

Utilisez obligatoirement ces vis à tête plate pour fixer le moteur. Elles ne doivent pas dépasser sinon les pignons dentés frotteront dessus.
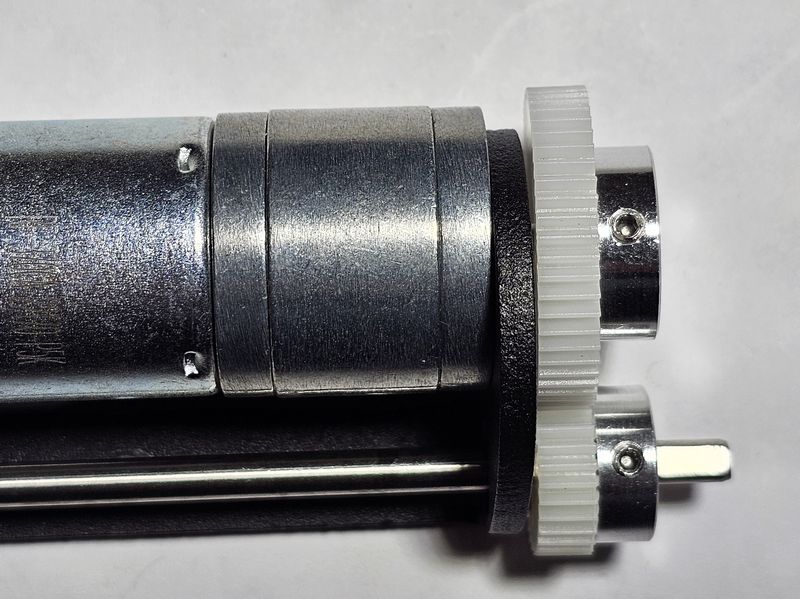
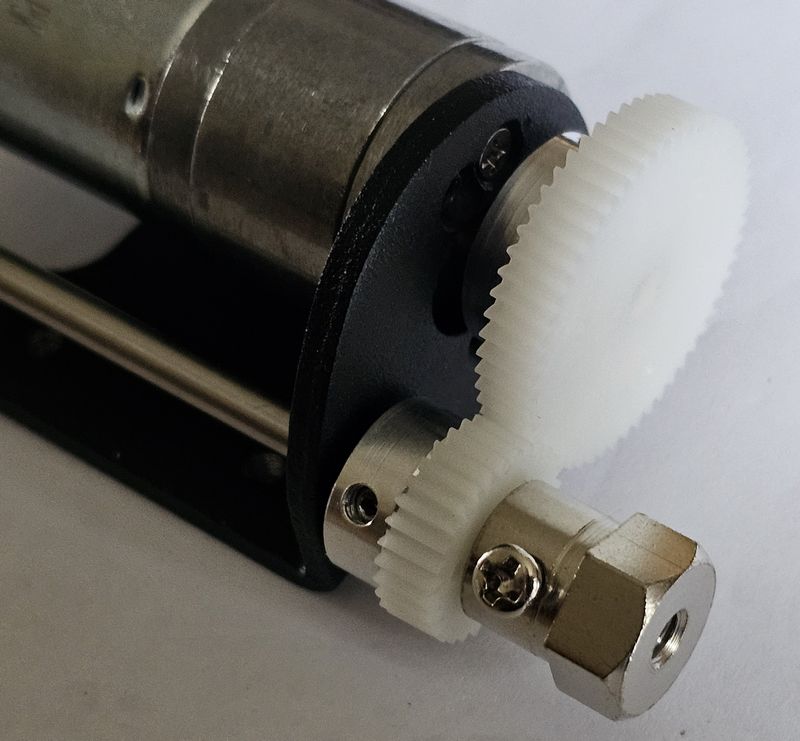
On peut mettre les pignons dans ce sens ou les inverser et mettre la bague en premier (comme plus bas sur les photos). J’ai finalement choisi le deuxième solution car un des pignon frottait un peu sur le support. Placer les roulements dans les trous puis faire passer l’axe. Le méplat le plus long vient du côté du moteur. Il faudra bien veiller à ce que les vis des pignons et des adaptateurs de roues hexagonaux se serrent sur la partie plate de l’axe. Ceci évite que les pignons ou les adaptateurs tournent librement sur l’axe en cas d’effort important.

L’adaptateur le plus court se monte côté pignons d’entraînement


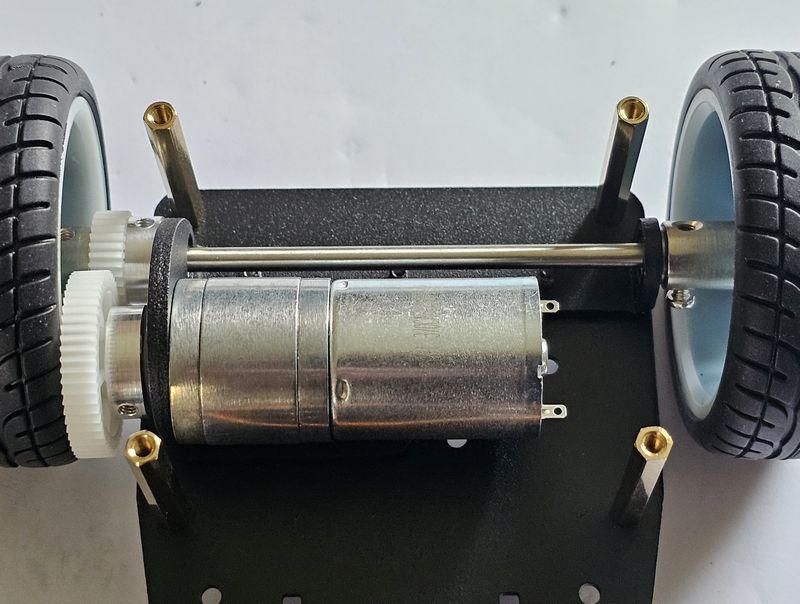
Vues d’ensemble du bloc moteur monté sur le châssis en aluminium.
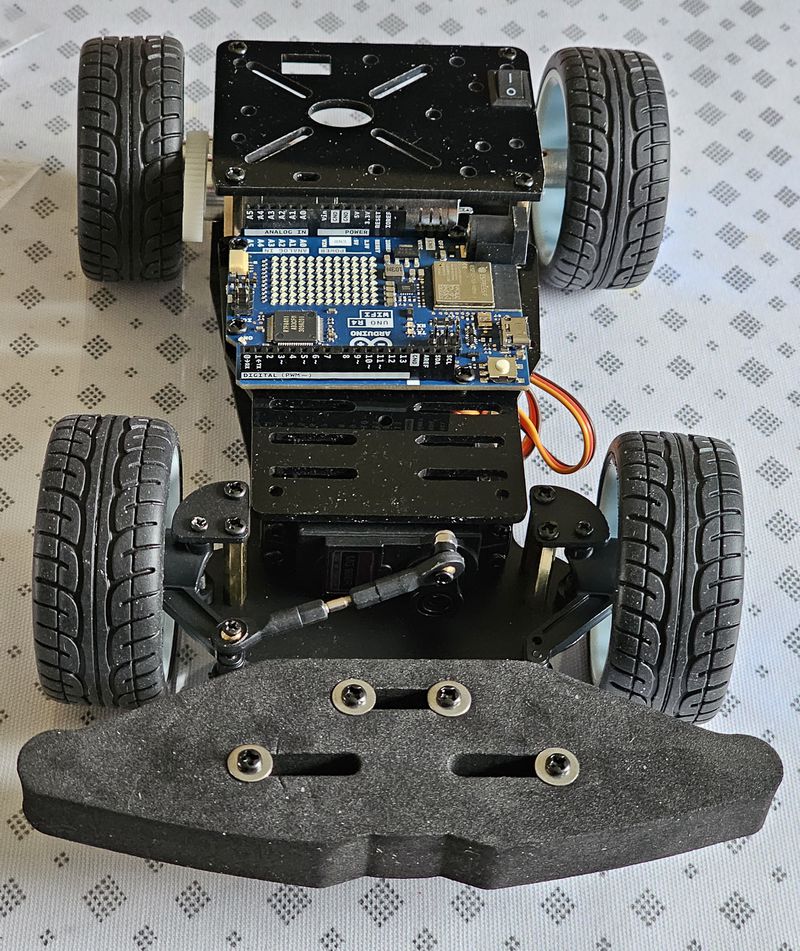
Montage de l’amortisseur
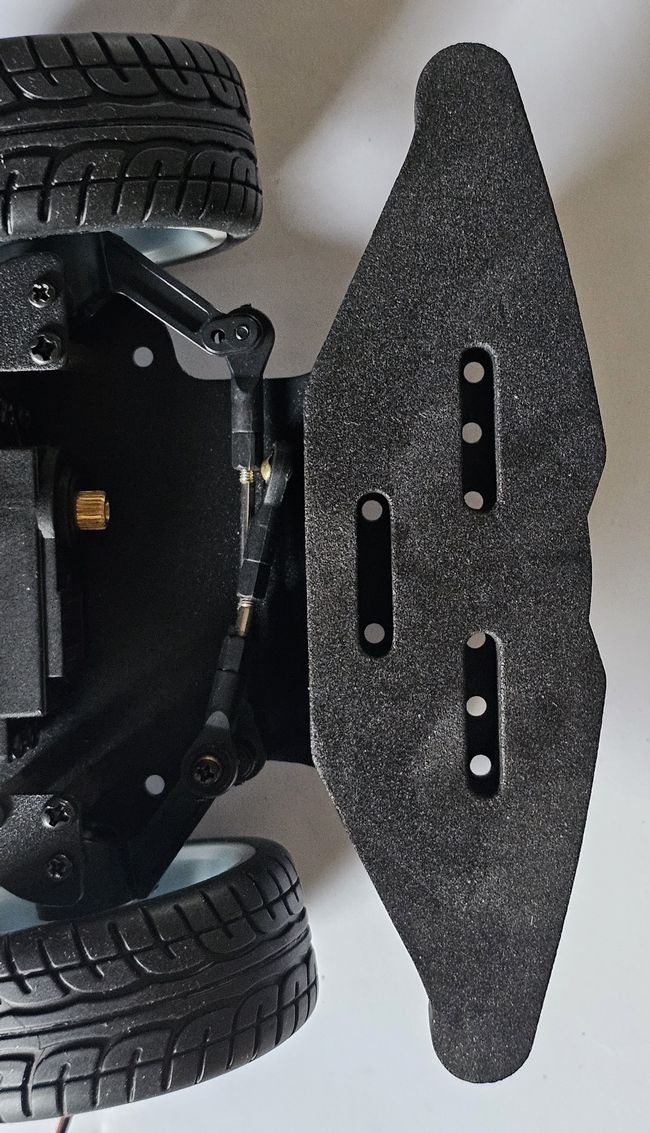
Les trous de l’amortisseur étaient prédécoupés, j’ai enlevé les morceaux de mousse et positionné le bloc de mousse pour voir où placer les entretoises.

Mise en place des entretoises.


Montage du châssis supérieur

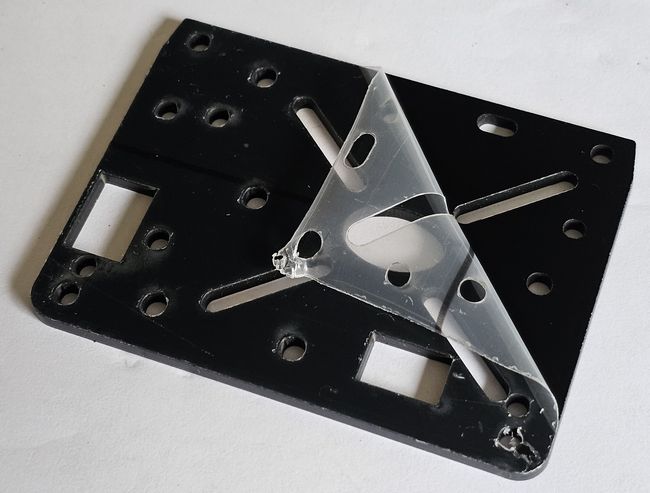
On commence par peler la protection (vous pouvez la garder en place si vous craignez d’abimer les plaques…
Montez les grandes entretoises à l’arrière du châssis.
Montez la plaque arrière sur les entretoises.

L’interrupteur vient se clipser dans un trou sur la plaque.
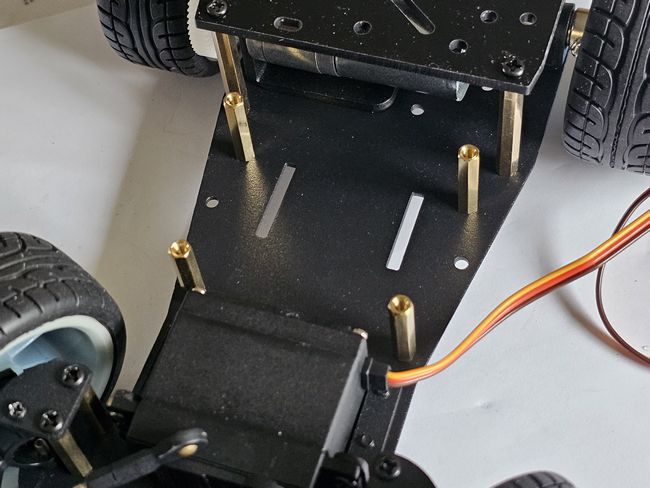
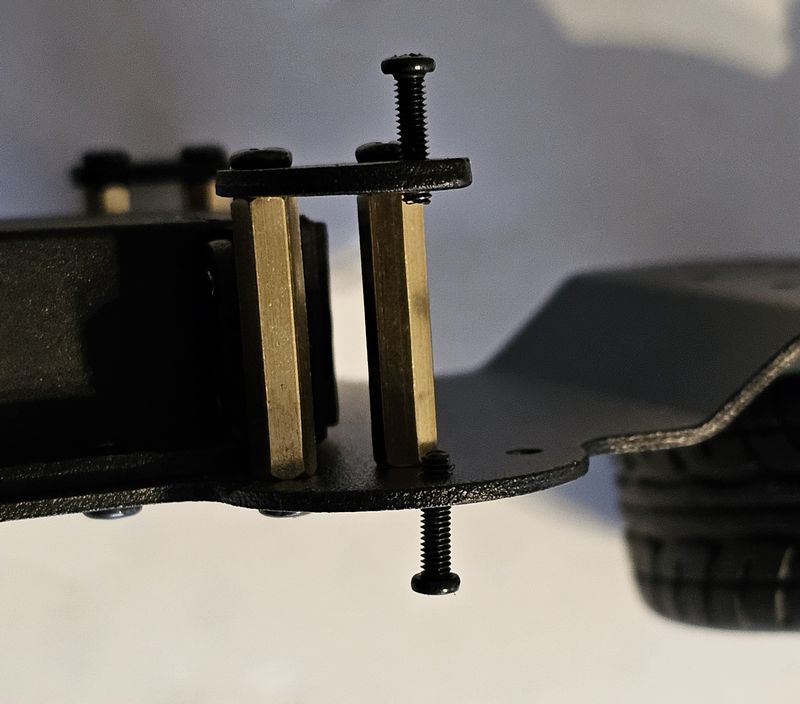
Montez les entretoises entre le moteur et le servo. C’est normalement ici que viendra se loger la batterie. Les deux fentes permettront de faire passer une sangle en velcro pour solidariser la batterie au châssis.

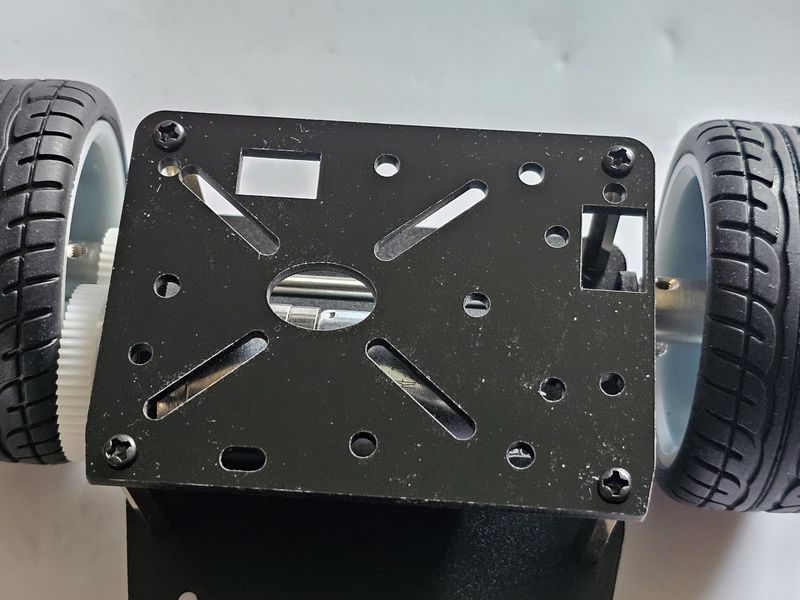
Posez la plaque supérieure. Elle comporte des trous prévus pour recevoir un Arduino (ci-dessous) ou un Raspberry Pi.
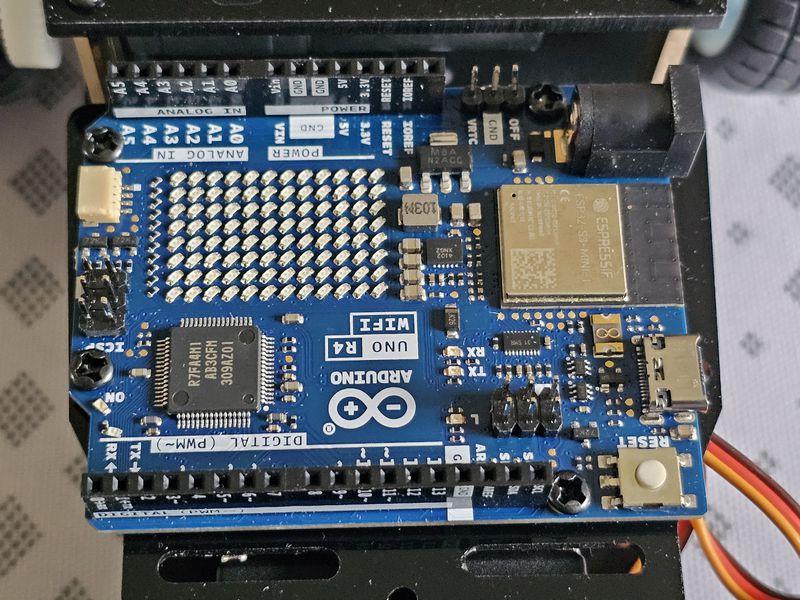
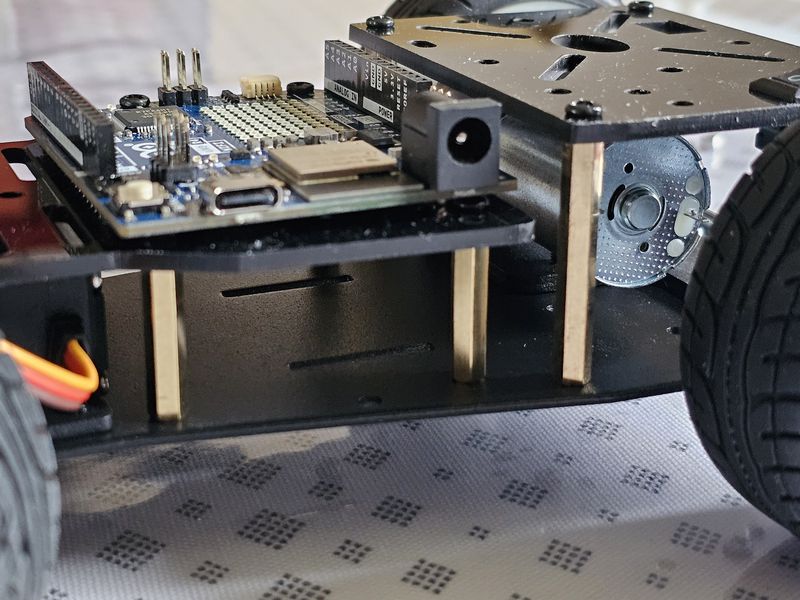
J’avais un Arduino R4 WiFi que j’ai utiliser pour tester le montage. Il n’y a eu aucun problème.
Vidéo du montage
Les images correspondent à une version différente de ce châssis mais donnent une bonne idée des opérations à réaliser.
Conclusion
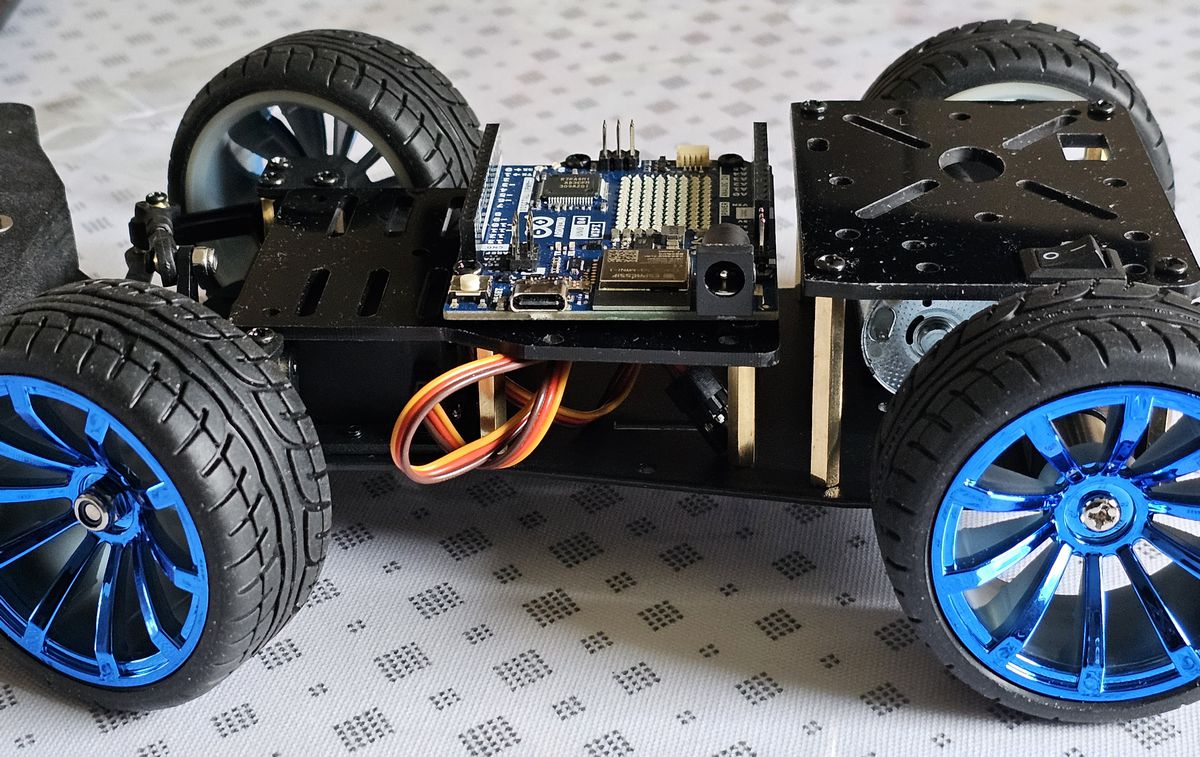
Concernant ce châssis, on a un ensemble rigide et solide. Les roues équipées de roulements, les biellettes avec les boules en laiton, le servomoteur de puissant, le tout monté sur un châssis en alu laissent présager une résistance à l’usure. Ce qui explique aussi le prix, plus élevé que celui d’autres ensembles basés sur un châssis en acrylique et des roues montées sur des bagues en laiton. La qualité se paye…
Vous trouvez ce châssis en ce moment pour 37,13$ sur le site Elecrow.
Je n’ai pas d’affiliation pour ce lien et ceux qui sont sur cette page.
Pour ma part, je vais mettre ce projet en sommeil jusqu’après les fêtes. J’envisage une suite avec une télécommande Flysky et un récepteur iBus, pilotant un Raspberry Pi PICO qui devrait suffire pour l’occasion. J’ai aussi dans mes cartons une caméra FPV 5GHz qui trouvera peut être sa place sur cet ensemble… A suivre…
C’est le dernier article de l’année sur le blog, alors
je vous souhaite de bonnes fêtes de fin d’année et un Joyeux Noël !
Les promos de Noël d’Elecrow :

et les promos de leurs partenaires
| Lien | Remise | Produit |
| https://www.elecrow.com/space-girl-soldering-kit.html | 20 % | Space Girl Soldering Kit |
| https://www.elecrow.com/radiant-rainbow-soldering-kit.html | 20 % | Radiant Rainbow Soldering Kit |
| https://www.elecrow.com/biology-girl-soldering-kit.html | 20 % | Biology Girl Soldering Kit |
| https://www.elecrow.com/cat-soldering-kit.html | 20 % | Cat Soldering Kit |
| https://www.elecrow.com/arteliery-portable-art-studio.html | 20 % | Arteliery Portable Art Studio |
Gagnez des Goodies !
Alors bonus pour cet article, Elecrow a joint à mon colis des Goodies : Vous pouvez gagner quelques lots en postant un commentaire sous l’article (un par personne) jusqu’au 30 décembre 2023. Tirage au sort automatisé par un plugin WordPress (liste de gagnants + liste complémentaire). Vous devez indiquer votre adresse mail valide. Après le tirage au sort les gagnants seront contactés en début d’année pour obtenir l’adresse postale à laquelle envoyer le cadeau. En cas de non-réponse au bout de 7 jours, le cadeau sera redistribué au suivant sur la liste des gagnants complémentaires.
Si c’est votre premier commentaire sur le blog il n’apparait pas tout de suite, il doit être validé manuellement par un modérateur… soyez patient(e).
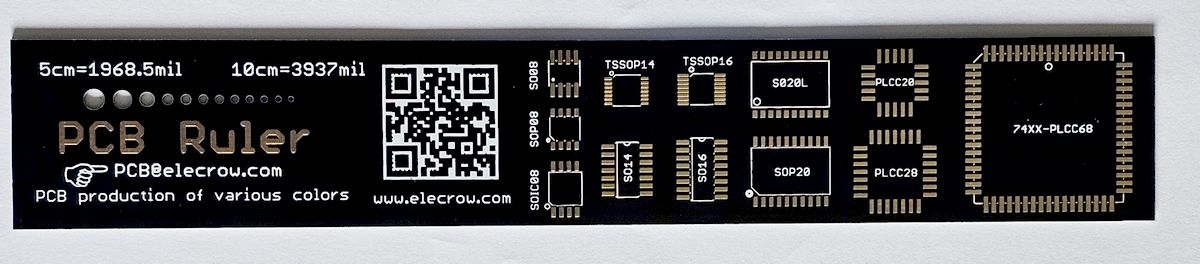
je propose n particulier cette règle, idéale pour ceux qui font des PCB, elle permet d’identifier les boîtiers
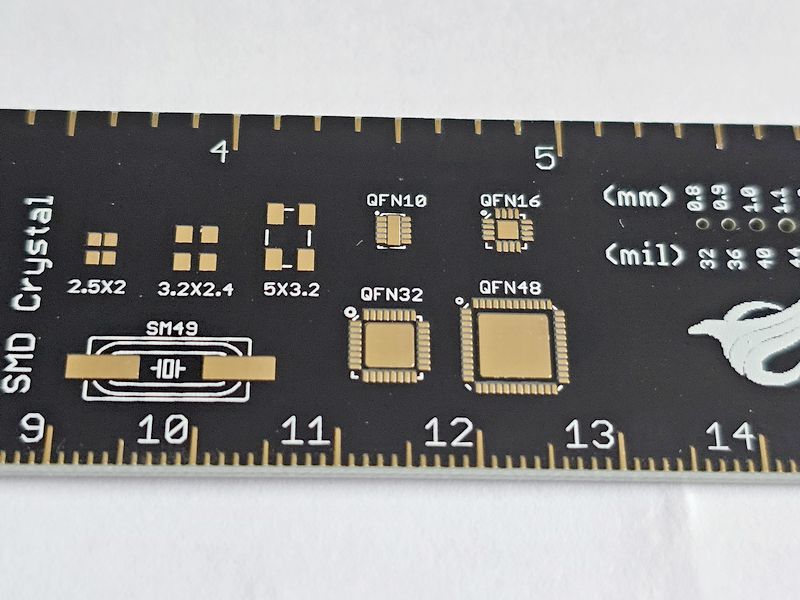
ou encore les composants, de mesurer le diamètre des fils…
J’en ai deux exemplaires à offrir
 |
 |
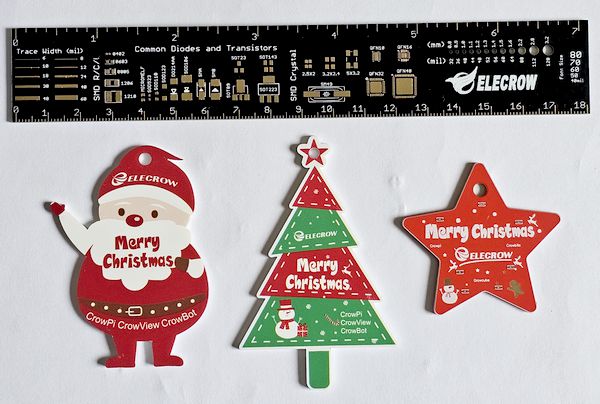 |
Sinon, j’ai ce genre de goodies, l’étoile peut recevoir des LEDs en face avant et la pile et le circuit de commande à l’arrière (je n’ai pas le schéma), le père Noël et le sapin c’est de la déco… |
Les lots que je vous propose :

Lot 1 : Un Raspberry Pi PICO + étoile
Lot 2 : Un Arduino nano + support bornier à vis + Étoile
Lot 3 : La règle PCB Elecrow + Père Noël + Étoile + sapin
Lot 4 : La règle PCB Elecrow + Père Noël + Étoile + sapin
Sources
https://www.elecrow.com/4wd-smart-car-robot-chassis-for-arduino-servo-steering.html?idd=5
Merci pour cet article et pour ce concours!!
Passez de bonnes fêtes!!
Ping : Châssis de voiture radiocommandée Elecrow pour Arduino et Raspberry Pi
Un article très intéressant comme d’habitude, si je laisse u commentaire c’est surtout pour les goodies…
Hello @ Tous !
Très sympa cet article ! merci François !
hummm ….. des Goodies …. 😛
Bonjour tous le monde, merci pour cette article génial .
Bonne fêtes à toute et tous.
Salut François,
C’est très intéressant, je me serais bien laissé tenté mais avec tous les autres projets que j’ai en cours, je n’aurai pas le temps de jouer avec 😉
Bonnes fêtes à tout le monde chez toi
JC
Merci Jean Christophe
bonnes fêtes de fin d’année à toute la famille
amitiés
Francois
Très bonne idée de cadeau.
Je vous souhaite pleins de Goodies dans vos souliers.
ainsi que des desserts avec plein de framboise(même si c’est pas de saison miam 🙂 )
merci !!
si si on trouve des framboise même si elles sont un peu chères 😀
Merci pour cet article qui m’ a rajeuni de… non, ne comptons pas. Mais de bonnes idées pour 2024.
Bonnes fêtes
Moi je préfère les MINIONs 😆 😛
Merci pour vos contenus toujours précis et enrichissants, encore un projet à rajouter à ma to do list !
Miam des goodies 😎
Toujours a la pointe et de bons conseils. Merci
J’ai toujours eu envie de m’en faire une.
Je tente bien entendu.
Bonne fêtes François
Merci pour la description complète du kit
Ça pourrait être pas mal de monter cette voiture avec mon garçon de bientôt 8ans 🙂
A voir prochainement
Bonnes fêtes
Voilà une nouvelle geekerie à faire en famille 🙂
Merci
Super idée de cadeaux (pour l’année prochaine ^^)
merci pour tous les articles, très intéressants.
passez de bonnes fêtes 🥳
Bonjour,
Merci pour cet article. Il me rappelle un « vieux » projet : j’avais réhabilité une voiture RC de mon fils avec une télécommande/récepteur frsky + Arduino (l’électronique initiale ayant grillée).
Encore merci pour vos articles
Bonnes fêtes de fin d’année.
Cdlt.
Nicolas
Ça pourrait faire une belle donkey car avec la caméra ☺️ Quoiqu’il faudrait un raspberry pi plutôt qu’un pico. En tous les cas beau projet 😉
Hâte de voir la suite avec le Pi et la caméra.
Bonne fêtes de fin d’année 2023 à tous
Merci pour vos publication et pour ce cadeau de Noel
Allez je joue !
Merci pour le tirage au sort et bonnes fêtes !
Bonjour François,
– Joyeux Noël !
– Un excellent article, comme d’habitude. Top la voiture radiocommandé.
bonjour à tous
Joyeuse fête et merci pour cette année riche
Très envie de jouer avec cette voiture ! 😍
Merci François.
Beau réveillon ! 🎄🎅🏻
j’ai très envie de jouer avec cette voiture !
Merci François.
Beau réveillon. 🎄🎅🏻
Article clair précis et concis
Bonne fêtes de fin d’année 2023 🥳🤶🎅🎄
Merci pour ce blog toujours à la pointe ! Et peut être ce cadeau de Noël à gagner .
super blog, supers articles ! un petit cadeau de Noël pour les grands enfants
Toujours au top François, autant à l’aise avec un rasberry qu’avec une imprimante 3D, un makey makey, un laser, des robots, et j’en passe… !
François est le meilleur.
Article très sympa, cela donne envie de tester cette Objet rapidement !
Allez je tente de le gagner en y postant ce commentaire.
En tout cas, toujours très technique et abordé avec pédagie. Je crois ce que c’est ce qui te résumé Francois.
Super article.
Merci. Bonnes fêtes.
Super projet de voiture rc !
Très intéressant, comme à ton habitude, merci.
Merci également pour ce petit jeu de fin d’année, je tente ma chance.
En attendant mon lot, je t’adresse mes meilleurs vœux pour cette fin d’année ainsi que pour la suivante 😉
Amitiés.
Génial
Encore une belle découverte.
Merci
Merveilleuse fêtes
Au top comme toujours !
Bonjour,
Je n’ai jamais essayé le raspberry ni le arduino mais je serais très curieuse d’essayer.
En tout cas merci de nous faire découvrir cela.
Merci à Elecrow et vous de nous donner la possibilité de decouvrir le raspberry et le arduino.
Bonne fêtes de fin d’année à tous.
Merci, bonnes fêtes !
Au top si on veut créer sa propre voiture radiocommandée avec fiston.
Et merci pour le concours.
Bonjour,
Voilà une bonne base de chassis pour faire une maquette de cyber-truc. Un petit coup d’impression 3D, et hop ! Plus qu’à tester 😀
allez encore une fois un commentaire
Je tente car pas encore essayer les micro model de arduino
Apres il faudra trouver le projet qui va bien
Très intéressant projet. j’ai déjà la RC Flysky, le Pico, il ne me manque qu’un super tuto comme Framboise 314 sait les faire.
La RC Flysky n’est pas chère, facile à utiliser, très répandue dans le monde aéromodélisme.
BONNE FÊTE à TOUS.
Bonjour François.
Encore un bel article et fort bien documenté.
Merci !
C’est un produit trop chouette. La qualité des matières semble être haute. Merci pour la qualité également de l’article et les photos macro. Je vais bien participer au concours en espérant d’utiliser l’article pour en monter un 😊
Belles fêtes de fin d’année à toi François et à tes lecteurs.
Davide
Merci beaucoup pour cet article magnifique
je participe au concours
Très chouette. J’ai été bluffé par un concurrent (Sunfounder), j’espère que tout ça est du même acabit, ça en a l’air !
Très bonne fin d’année à tous, merci à François et à tous ceux qui contribuent à apporter la connaissance (ici ou sur le blog).
Joyeuses fêtes 🥳 que la nouvelle année soit pleine de nouveaux projets framboise