

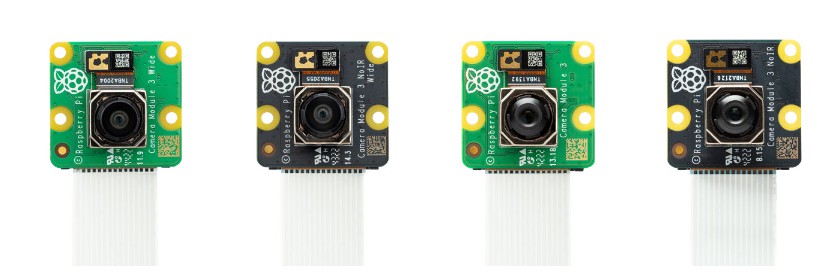
La Fondation Raspberry Pi a sorti le 9 janvier 2023 une gamme de nouvelles caméras pour le Raspberry Pi. Ces modèles 12 mégapixels sont disponibles en version lumière visible et infrarouge, avec deux objectifs AUTOFOCUS, un objectif « normal » et un grand angle. Ce sont donc 4 caméras v3 qui sont sorties, accompagnées d’une caméra HQ équipée d’une monture M12 en remplacement de la monture C-CS d’origine. Cette monture M12 donne accès à une nouvelle gamme d’objectifs, en particulier des Fish-eye
Kubii m’a proposé de tester gratuitement ces caméras.
Je les en remercie et c’est donc un
============= Article sponsorisé =============
Je n’ai pas de lien direct avec Kubii. Ils m’ont simplement offert le matériel et j’ai choisi de rédiger cet article, tout en conservant ma liberté rédactionnelle.
Au sommaire :
- 1 Les nouvelles caméras Raspberry Pi v3
- 1.1 Le capteur Sony IMX708
- 1.2 Utiliser les caméras v3 sur des Raspberry Pi 2, 3, Pi Zero
- 1.3 Les Caméras Pi v3
- 1.3.1 Description
- 1.3.2 Spécifications
- 1.3.3 Comparatif
- 1.3.4 Dimensions
- 1.3.5 Détection du type de caméra
- 1.3.6 Test de la caméra « Normale » sur le Raspberry Pi 4
- 1.3.7 Enregistrement d’images
- 1.3.8 Test de la caméra « Wide » sur le Raspberry Pi 4
- 1.3.9 Mise au point automatique
- 1.3.10 Utilisation de l’application Qt Picamera2 app
- 2 La nouvelle caméra Raspberry Pi HQ avec monture M12
- 3 Conclusion
- 4 Sources
Les nouvelles caméras Raspberry Pi v3
Le capteur Sony IMX708
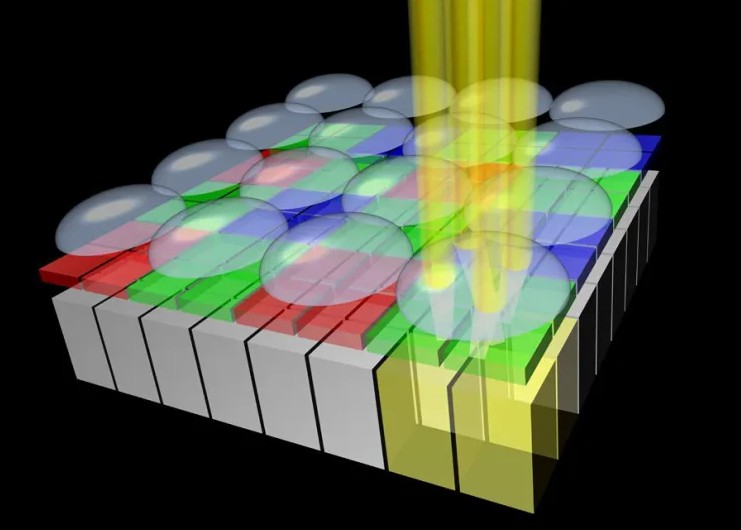 Le capteur IMX708 équipe de nombreux smartphones. Il intègre les technologies les plus récentes de Sony. Le capteur est rétroéclairé :
Le capteur IMX708 équipe de nombreux smartphones. Il intègre les technologies les plus récentes de Sony. Le capteur est rétroéclairé :
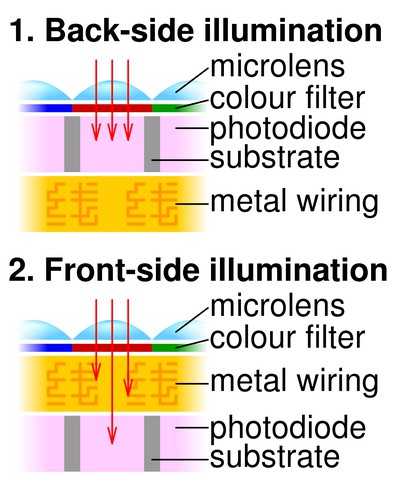 Les capteurs plus anciens (2) reçoivent la lumière au travers de liaisons de connexion métallique, ce qui diminue la quantité de lumière.
Les capteurs plus anciens (2) reçoivent la lumière au travers de liaisons de connexion métallique, ce qui diminue la quantité de lumière.
Les capteurs récents comme ceux des caméras Pi reçoivent la lumière directement sur les photodiodes (1), ce qui améliore la sensibilité.
Comme tous les capteurs photo/vidéo, l’IMX708 est recouvert par une matrice colorée dite de Bayer qui filtre la lumière pour chaque pixel n rouge, vert ou bleu.
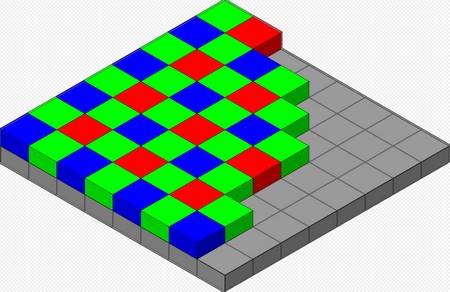 Ainsi chaque pixel ne reçoit qu’une couleur. En raison de la sensibilité de l’œil humain il y a 50% de filtres verts, 25% de rouge et 25% de bleu. Pour recréer une image complète, il faut procéder à une opération dite de dé-matriçage. Cela permet par interpolation de recréer pour chaque pixel les couleurs manquantes. Par exemple pour un pixel sensible au rouge, le capteur recrée les valeurs des couleurs bleu et vert en calculant une valeur approchée en fonction des pixels bleu et vert voisins. Cela permet de sortir une image avec le même nombre de pixels que le capteur, mais avec des valeurs approchées.
Ainsi chaque pixel ne reçoit qu’une couleur. En raison de la sensibilité de l’œil humain il y a 50% de filtres verts, 25% de rouge et 25% de bleu. Pour recréer une image complète, il faut procéder à une opération dite de dé-matriçage. Cela permet par interpolation de recréer pour chaque pixel les couleurs manquantes. Par exemple pour un pixel sensible au rouge, le capteur recrée les valeurs des couleurs bleu et vert en calculant une valeur approchée en fonction des pixels bleu et vert voisins. Cela permet de sortir une image avec le même nombre de pixels que le capteur, mais avec des valeurs approchées.
Une autre solution est de récupérer une image « brute » ou RAW sans interpolation, puis de la traiter sur l’ordinateur qui est beaucoup moins limité que les caméras, aussi bien en consommation électrique qu’en temps de traitement. On obtient alors des images de bien meilleure qualité que ce que peut délivrer une PiCam. C’est possible avec ces caméras.
Utiliser les caméras v3 sur des Raspberry Pi 2, 3, Pi Zero
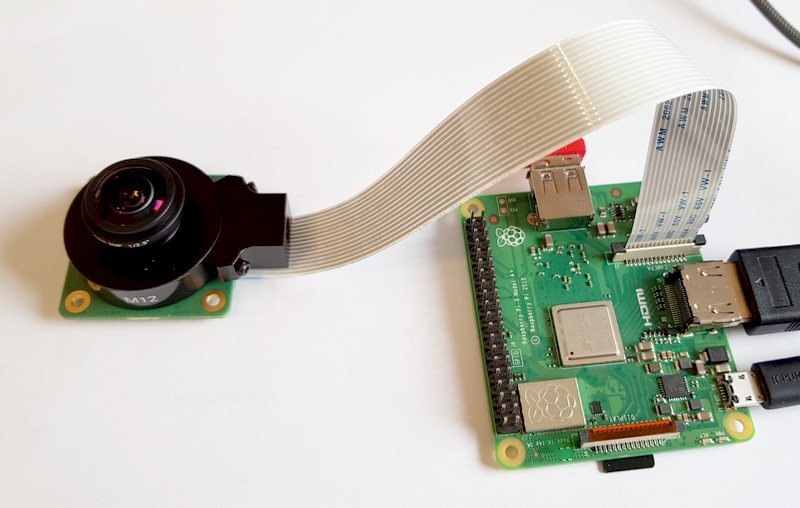
Test de la Caméra HQ sur Raspberry Pi 3 A+
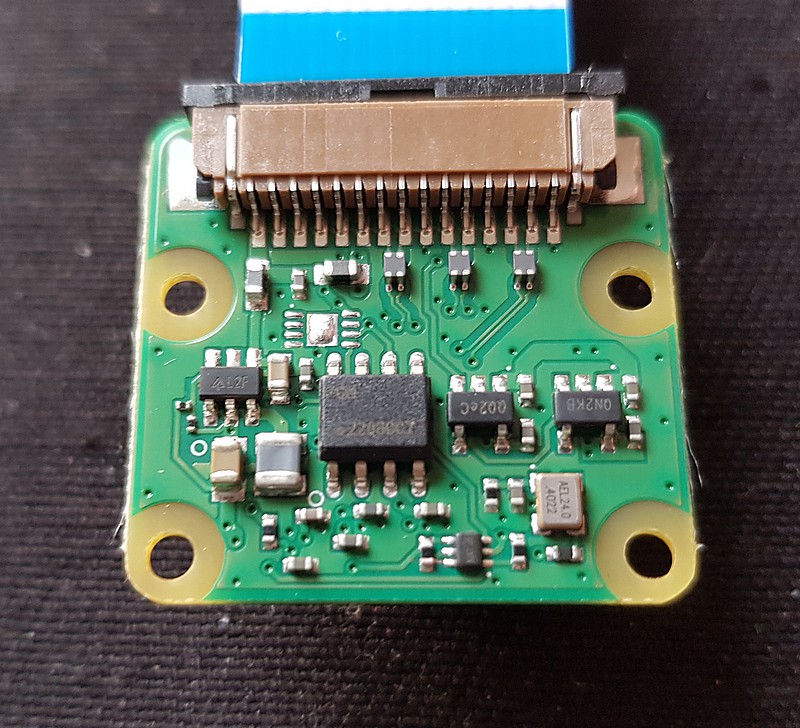
Test de la PiCam v3 sur Raspberry Pi 3 B+ Brésilien (PCB Bleu)
Alors que l’utilisation des caméras ne pose pas de problème sur le Raspberry Pi 4 avec la dernière version de Raspberry Pi OS, les versions précédentes du Raspberry Pi nécessitent une configuration préalable pour pouvoir utiliser les PiCam v3. Il faut de toute façon un Raspberry Pi OS Bullseye (la dernière version).
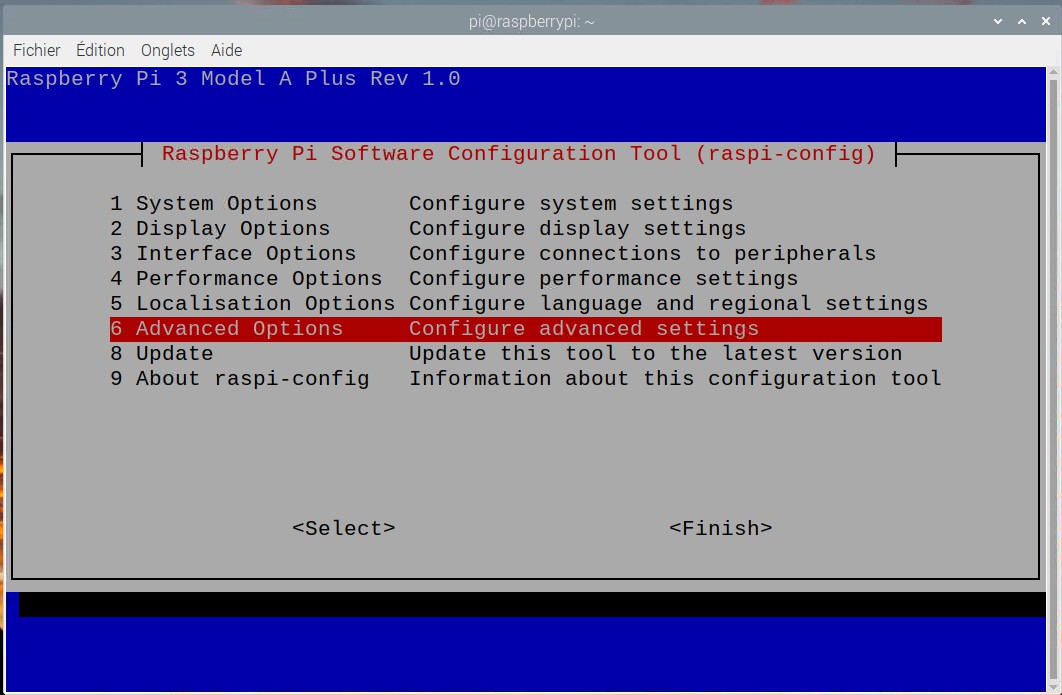
Ouvrez raspi-config :
sudo raspi-config
Descendez dans les options avancées (6)
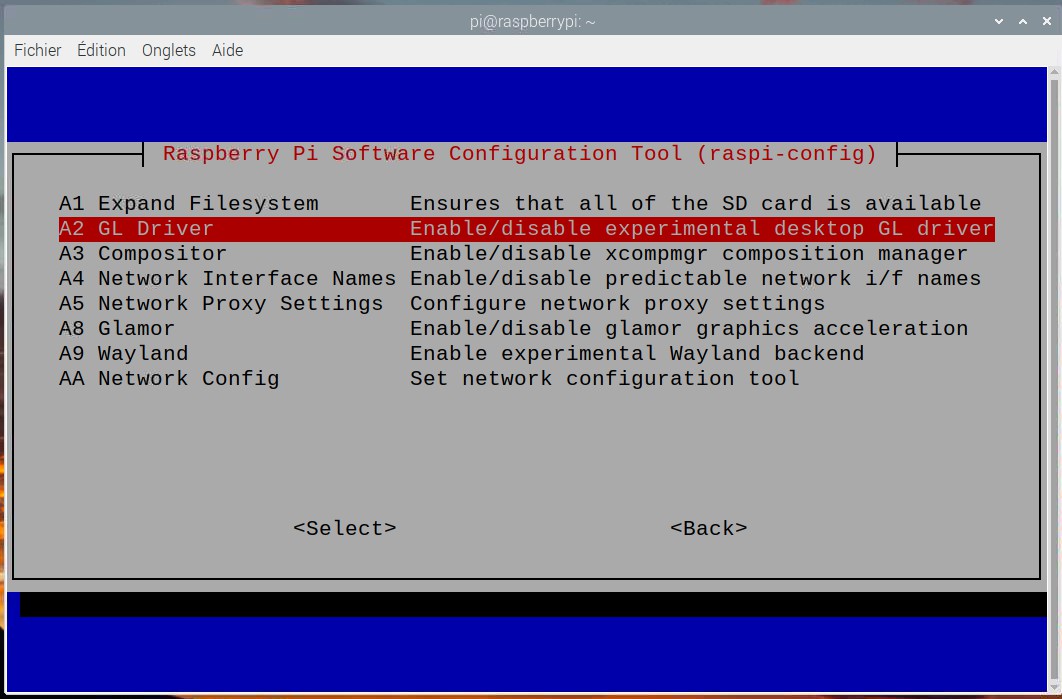
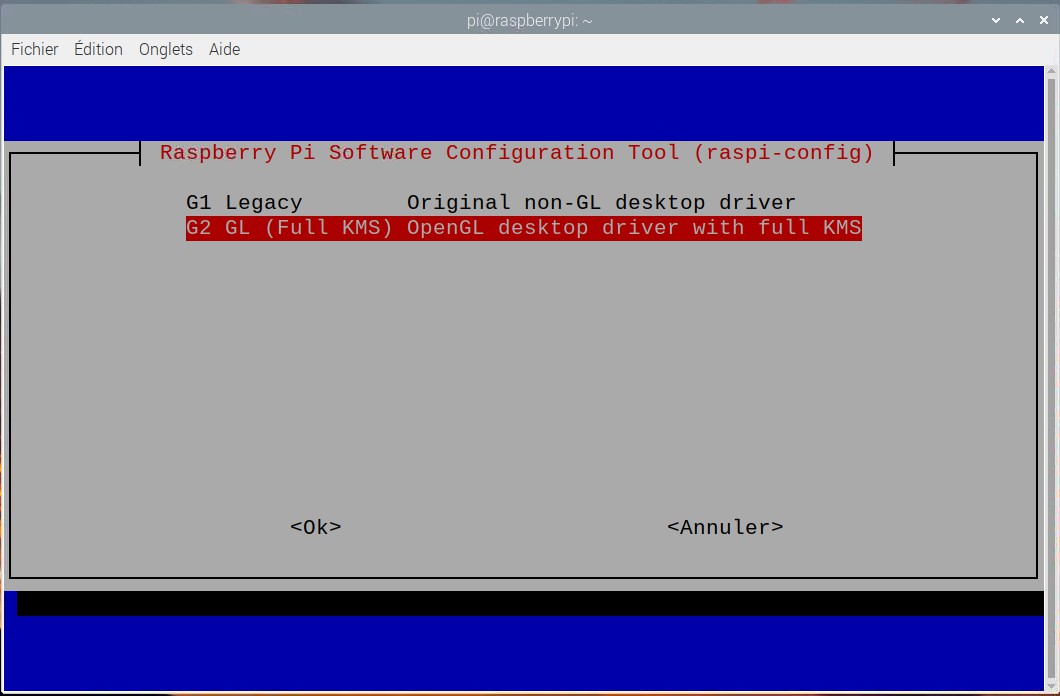
Activez le GL DRIVER FULL KMS (A2 => G2)
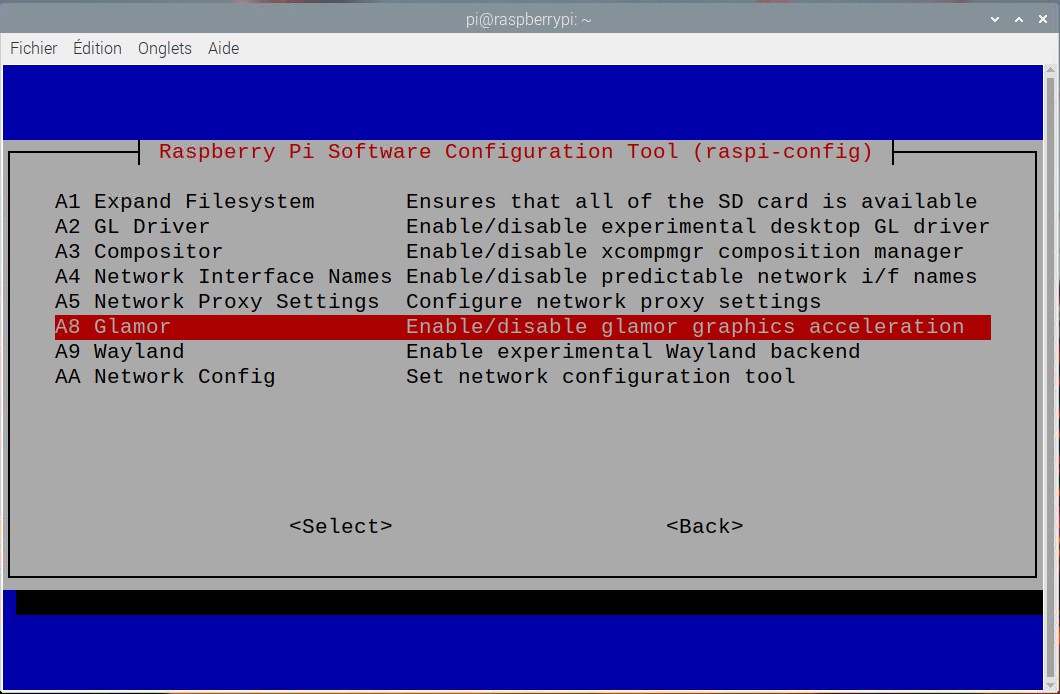
Activez l’accélération graphique GLAMOR (A8)
Redémarrez le Raspberry Pi et la caméra devrait maintenant fonctionner.
Les Caméras Pi v3
Les nouvelles caméras sorties début janvier 2023 sont décrites dans une notice publiée par la Fondation Raspberry Pi.
Description
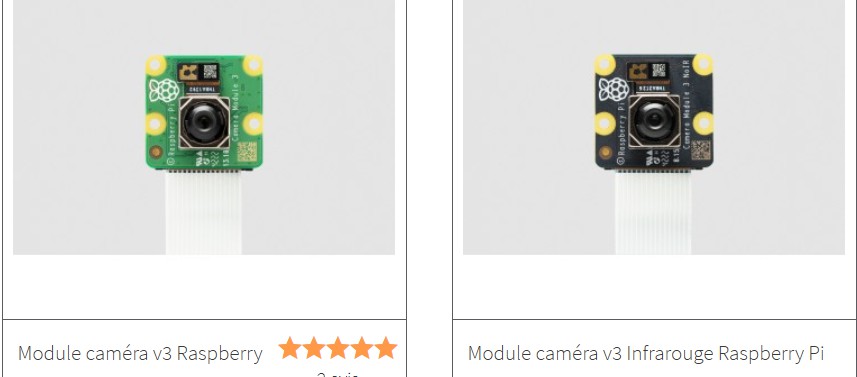
La PiCam v3 est une caméra compacte pour le Raspberry Pi. Elle est équipée d’un IMX708 de 12 mégapixels avec HDR, et dispose d’un autofocus à détection de phase. La PiCam v3 est disponible en version objectif standard et en version grand angle, toutes deux disponibles avec ou sans filtre infrarouge.
La PiCam v3 peut être utilisé pour prendre des vidéos full HD ainsi que des photos, et dispose d’un mode HDR jusqu’à 3 mégapixels. Son fonctionnement est entièrement pris en charge par la bibliothèque libcamera, y compris la fonction d’autofocus rapide.
Facile à utiliser pour les débutants, elle offre de nombreuses possibilités aux utilisateurs avancés. La PiCam v3 est compatible avec tous les ordinateurs Raspberry Pi disposant d’un connecteur CSI.
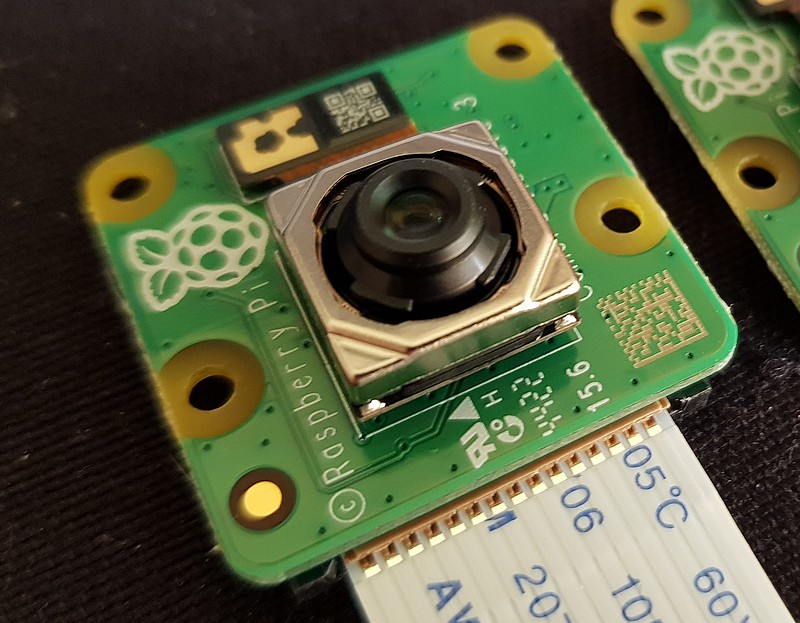
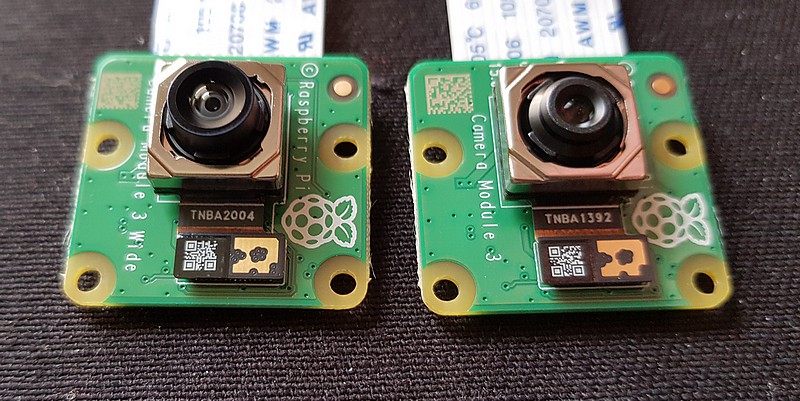
La taille du circuit imprimé et les trous de montage restent les mêmes que pour la PiCam v2. Cependant la dimension Z (hauteur) diffère : en raison de l’amélioration de l’optique, la PiCam v3 est plus haute de quelques millimètres que le module caméra v2. Elle n’est donc pas compatible avec les anciens boîtiers.
Toutes les variantes de la PiCam v3 possèdent :
- Un capteur d’image CMOS de 12 mégapixels rétroéclairé (Sony IMX708).
- Rapport signal/bruit (SNR) élevé
- Correction dynamique des pixels défectueux (DPC) intégrée en 2D
- Autofocus à détection de phase (PDAF) pour un autofocus rapide
- Fonction de re-mosaïque QBC
- Mode HDR (sortie jusqu’à 3 mégapixels)
- Sortie de données série sur port CSI-2
- Communication série 2 fils (supporte le mode fast I2C et le mode fast-plus)
- Contrôle série 2 fils du mécanisme de mise au point
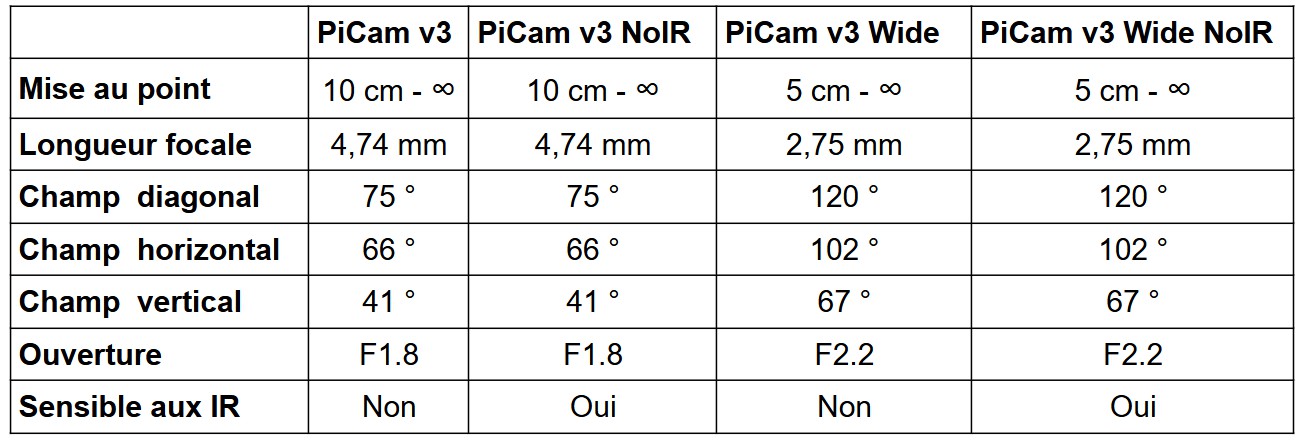
Spécifications
- Capteur : Sony IMX708
- Résolution : 11,9 mégapixels – 4608 × 2592 pixels
- Taille du capteur : diagonale du capteur de 7,4 mm
- Taille des pixels : 1,4μm × 1,4μm
- Modes vidéo courants : 1080p50, 720p100, 480p120
- Sortie : RAW10
- Filtre anti-IR : Intégré dans les variantes standard ; non présent dans les variantes NoIR
- Système autofocus : Autofocus à détection de phase
- Dimensions : 25 × 24 × 11.5mm (12.4mm de hauteur pour les variantes Wide)
- Longueur du câble ruban : 200 mm
- Connecteur de câble : 15 × 1mm FPC
- Température de fonctionnement : 0°C à 50°C
- Durée de la production : La PiCam v3 restera en production jusqu’en janvier 2030 au moins.
Comparatif
Dimensions
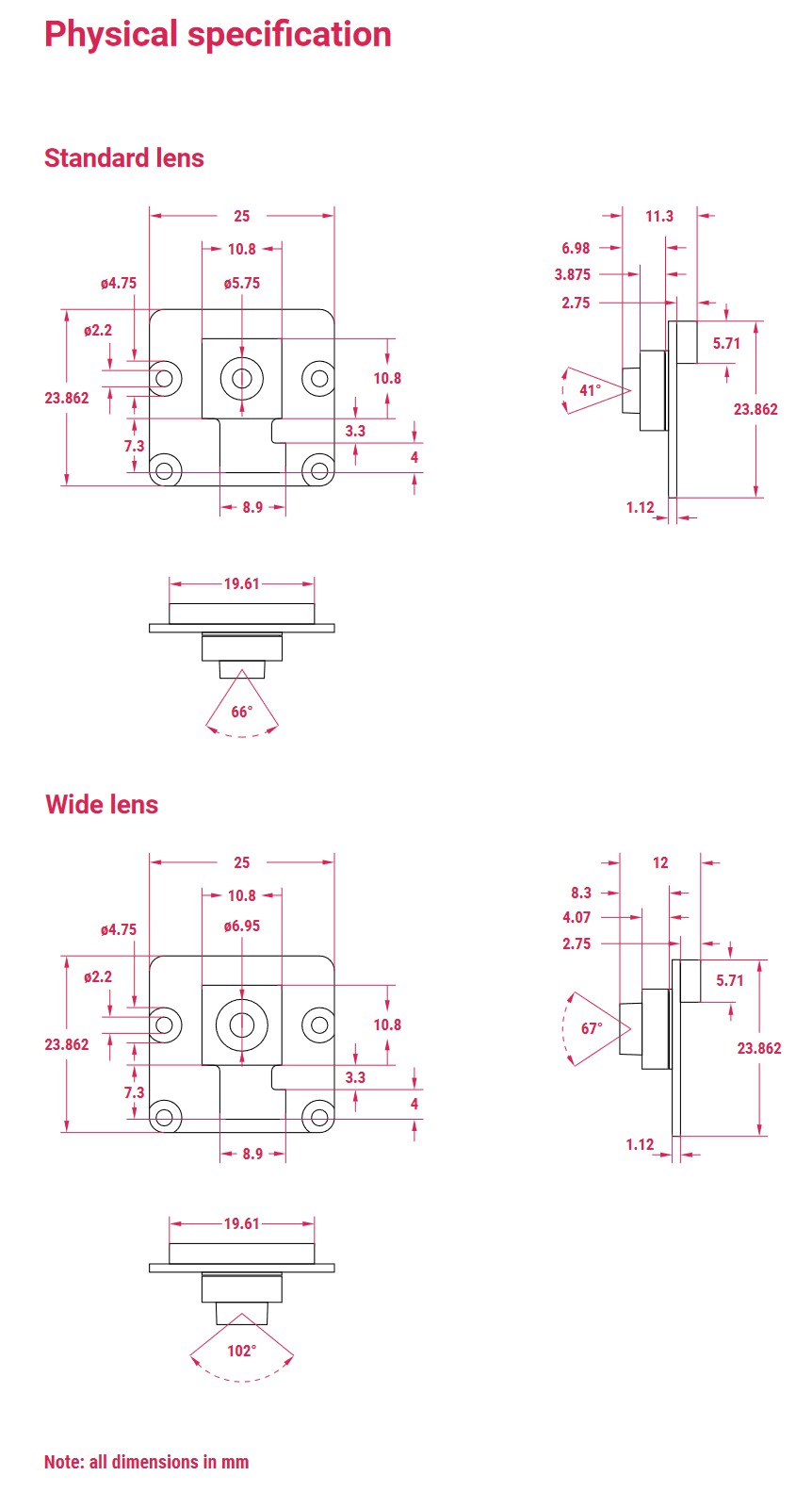
Cliquer pour agrandir
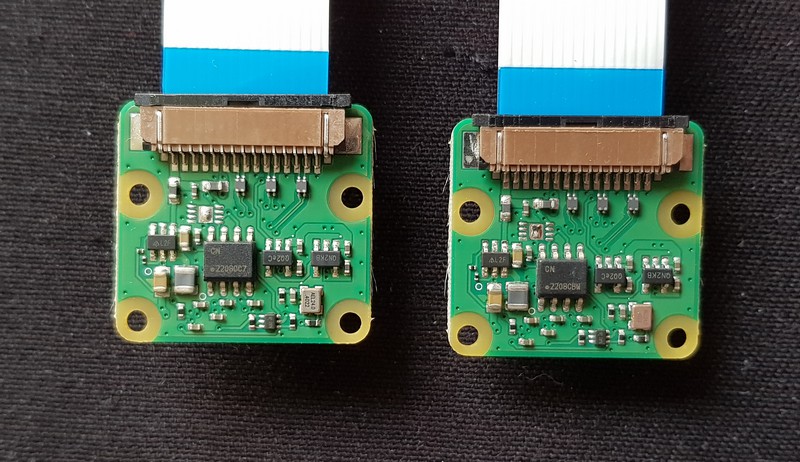
Détection du type de caméra
pi@raspberrypi:~ $ libcamera-hello --list-camera
Available cameras
-----------------
0 : imx708 [4608x2592] (/base/soc/i2c0mux/i2c@1/imx708@1a)
Modes: 'SRGGB10_CSI2P' : 1536x864 [120.13 fps - (768, 432)/3072x1728 crop]
2304x1296 [56.03 fps - (0, 0)/4608x2592 crop]
4608x2592 [14.35 fps - (0, 0)/4608x2592 crop]
pi@raspberrypi:~ $ libcamera-hello --list-camera
Available cameras
-----------------
0 : imx708_wide [4608x2592] (/base/soc/i2c0mux/i2c@1/imx708@1a)
Modes: 'SRGGB10_CSI2P' : 1536x864 [120.13 fps - (0, 0)/4608x2592 crop]
2304x1296 [56.03 fps - (0, 0)/4608x2592 crop]
4608x2592 [14.35 fps - (0, 0)/4608x2592 crop]
pi@raspberrypi:~ $ libcamera-hello --list-camera
Available cameras
-----------------
0 : imx708_noir [4608x2592] (/base/soc/i2c0mux/i2c@1/imx708@1a)
Modes: 'SRGGB10_CSI2P' : 1536x864 [120.13 fps - (0, 0)/4608x2592 crop]
2304x1296 [56.03 fps - (0, 0)/4608x2592 crop]
4608x2592 [14.35 fps - (0, 0)/4608x2592 crop]
La commande libcamera-hello –list-camera fournit les informations nécessaires. Le type de caméra est indiqué en clair, avec la précision du grand angle (wide) ou de l’infrarouge (NoIR).
Test de la caméra « Normale » sur le Raspberry Pi 4
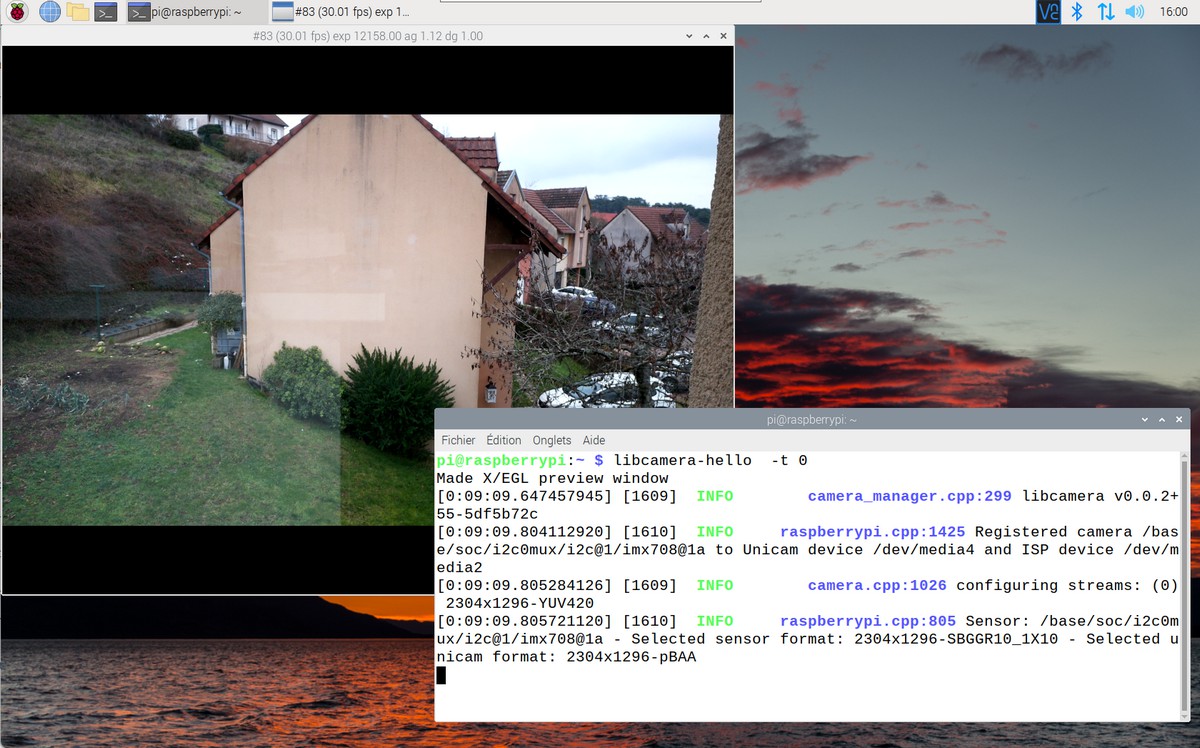 C’est toujours la même commande avec cette fois le paramètre -t 0
C’est toujours la même commande avec cette fois le paramètre -t 0
Une fenêtre de prévisualisation s’ouvre et affiche l’image enregistrée par la caméra (ici avec un objectif normal)
Enregistrement d’images

image HDR
libcamera-jpeg –hdr 0 -o PiCam3_Normal_HDR_01.jpg
Cette commande enregistre une image HDR et l’enregistre dans un fichier JPG. (-o = output file)

Image plus sombre : libcamera-jpeg –ev -1 -o darker.jpg

Image plus claire : libcamera-jpeg –ev 1 -o brighter.jpg
On peut également changer la taille de l’image enregistrée, lui faire subir des rotations, l’enregistrer en PNG, BMP, YUV, RGB, …
Vous trouverez la documentation complète (en Anglais) de libcamera dans la documentation en ligne fournie par la Fondation Raspberry Pi.
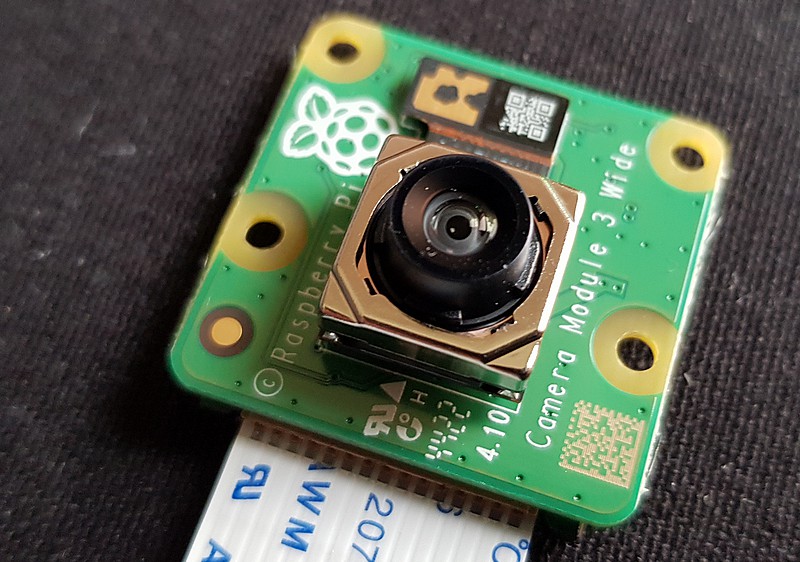
Test de la caméra « Wide » sur le Raspberry Pi 4
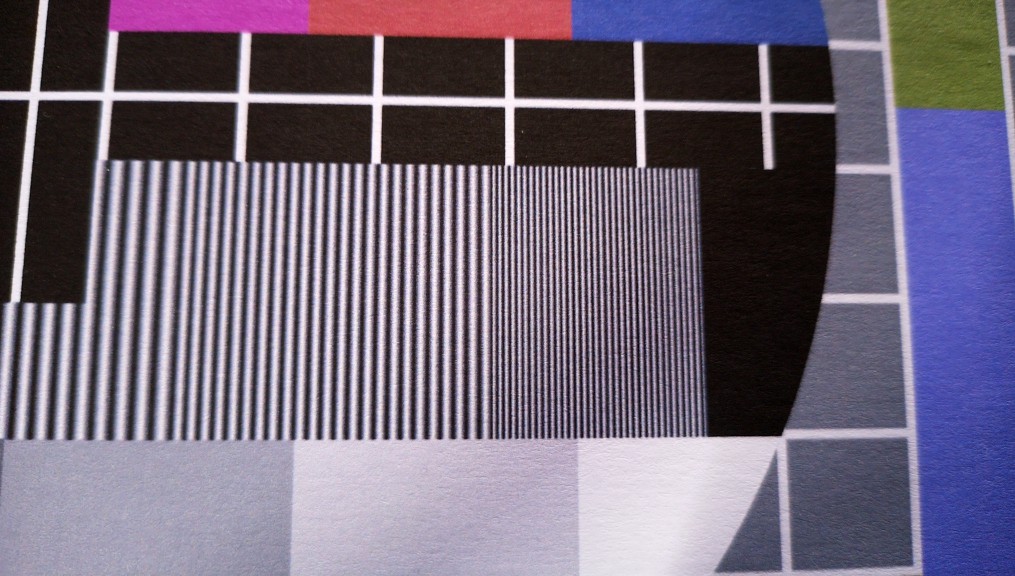
La caméra Wide a une ouverture plus grande. La mise au point peut se faire à plus faible distance que pour l’objectif « standard ». (c’est dû à la focale plus courte). Toujours prise du même endroit, l’image ci-dessous permet de juger du résultat.

Image au format maxi – Cliquez pour agrandir
Pas de vignettage visible mais on note une légère déformation dans les angles pas rédhibitoire si on fait de la surveillance ou de la lecture de QRcode.

La caméra est positionnée environ à 45°et l 0 de la règle est sous l’objectif de la caméra.

La netteté est rapidement atteinte et les graduations sont nettes à partir du marquage 3 ou 4 cm (je vous laisse calculer l’hypoténuse 😉 )

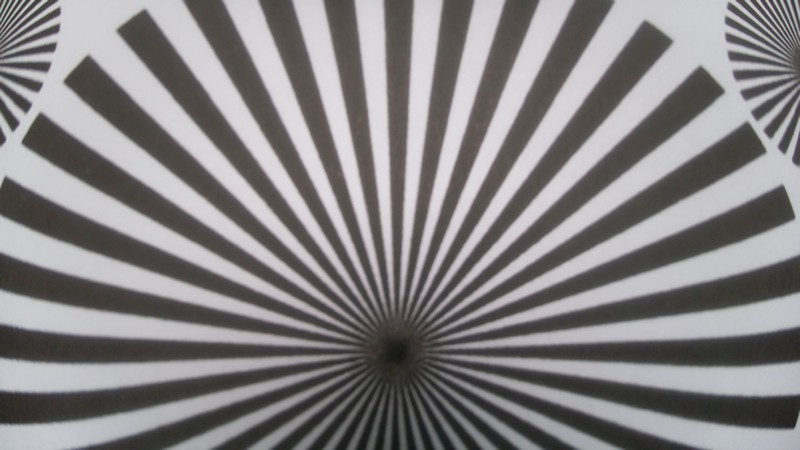 Ici une mire est placée devant la caméra à faible distance et la mise au point se fait correctement. On a toujours une légère déformation dans les angles.
Ici une mire est placée devant la caméra à faible distance et la mise au point se fait correctement. On a toujours une légère déformation dans les angles.
Mise au point automatique
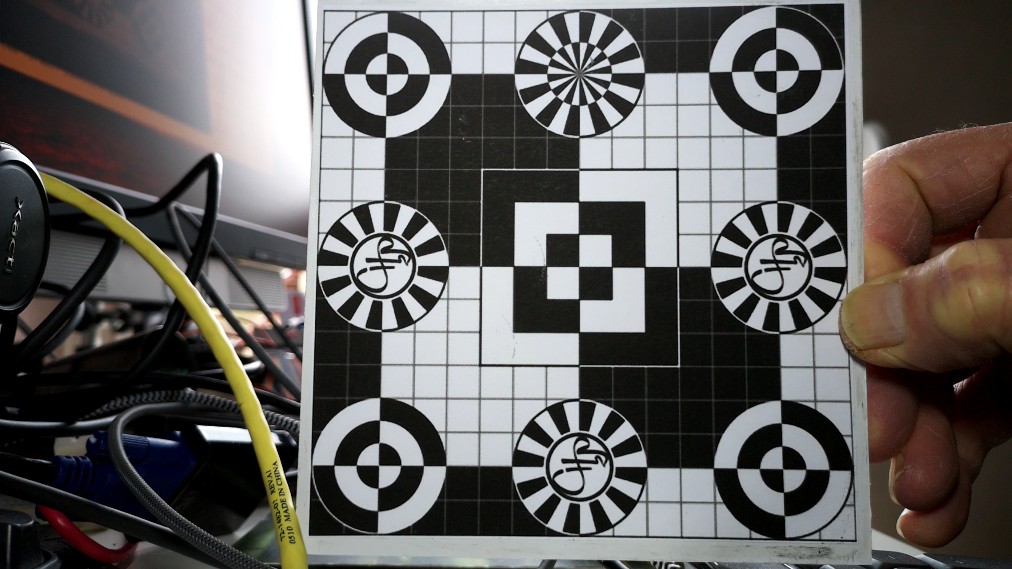
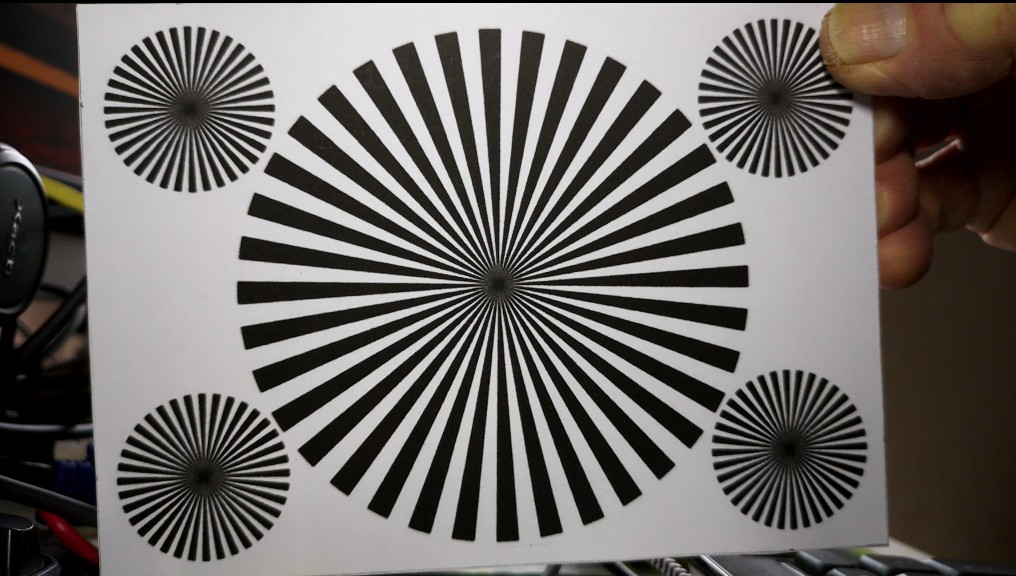

Les test de mise au point sont corrects et la caméra répond rapidement. Les mires ci-dessus sont déplacées avant la prise de vue et la netteté des images est au rendez vous, même à courte distance (dernière image). Les images sont brutes, non retouchées ni retaillées.
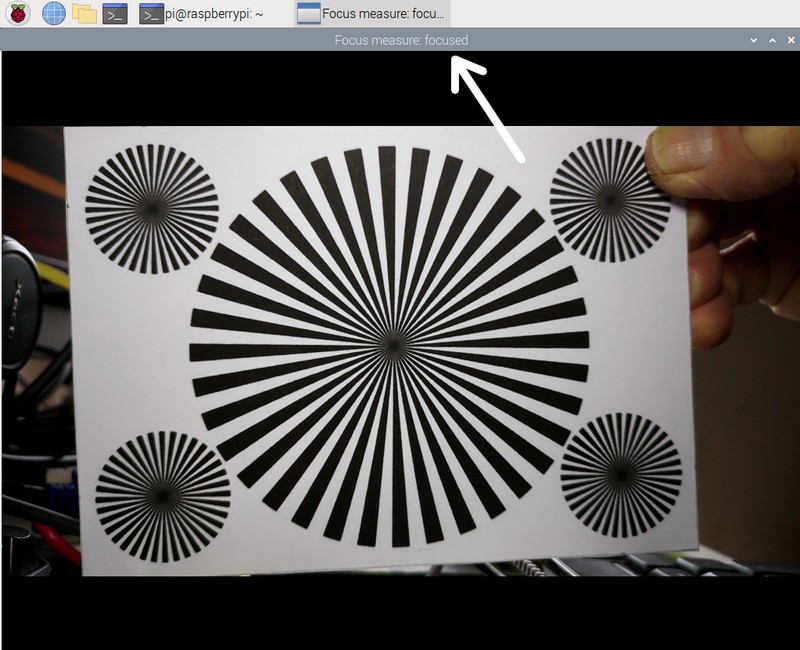 Il est possible d’ajouter dans la barre de la fenêtre l’indication de verrouillage du focus de la caméra.
Il est possible d’ajouter dans la barre de la fenêtre l’indication de verrouillage du focus de la caméra.
libcamera-hello –info-text « Focus Measure %afstate »
Exemple de fonctionnement de l’autofocus.
Utilisation de l’application Qt Picamera2 app
Cette application offre un.e interface graphique pour contrôler la caméra connectée au Raspberry Pi. Sur un Raspberry Pi avec 1Go de RAM elle peut planter. Prévoyez au minimum 2Go. Il faut commencer par l’installer :
Ensuite on peu démarre l’application graphique :
python3 picamera2/apps/app_full.py
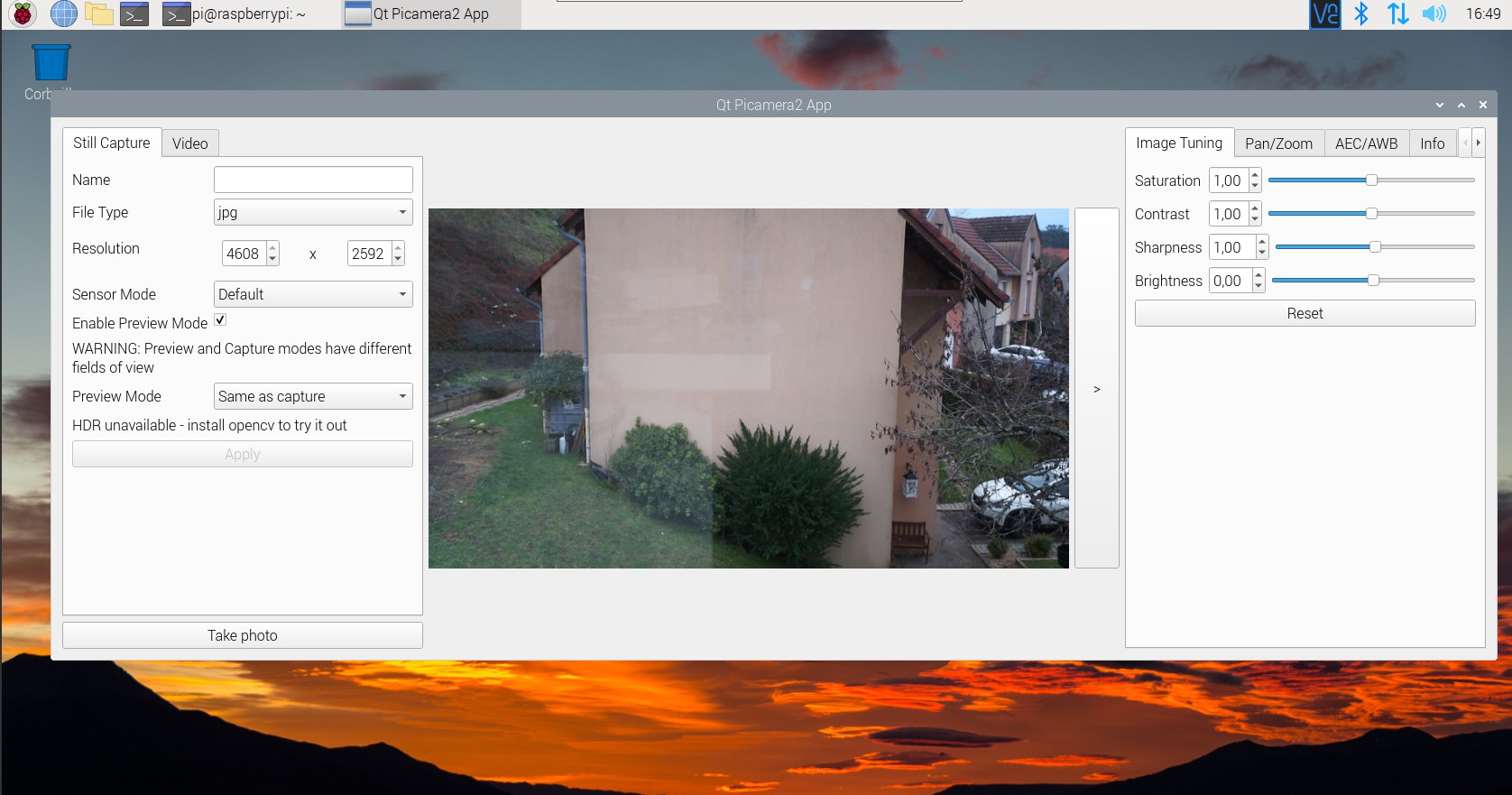
Ah, le HDR n’est disponible dans l’appli que si opencv est installé, allez hop, on l’installe :
sudo apt install python3-opencv
et on relance l’application.
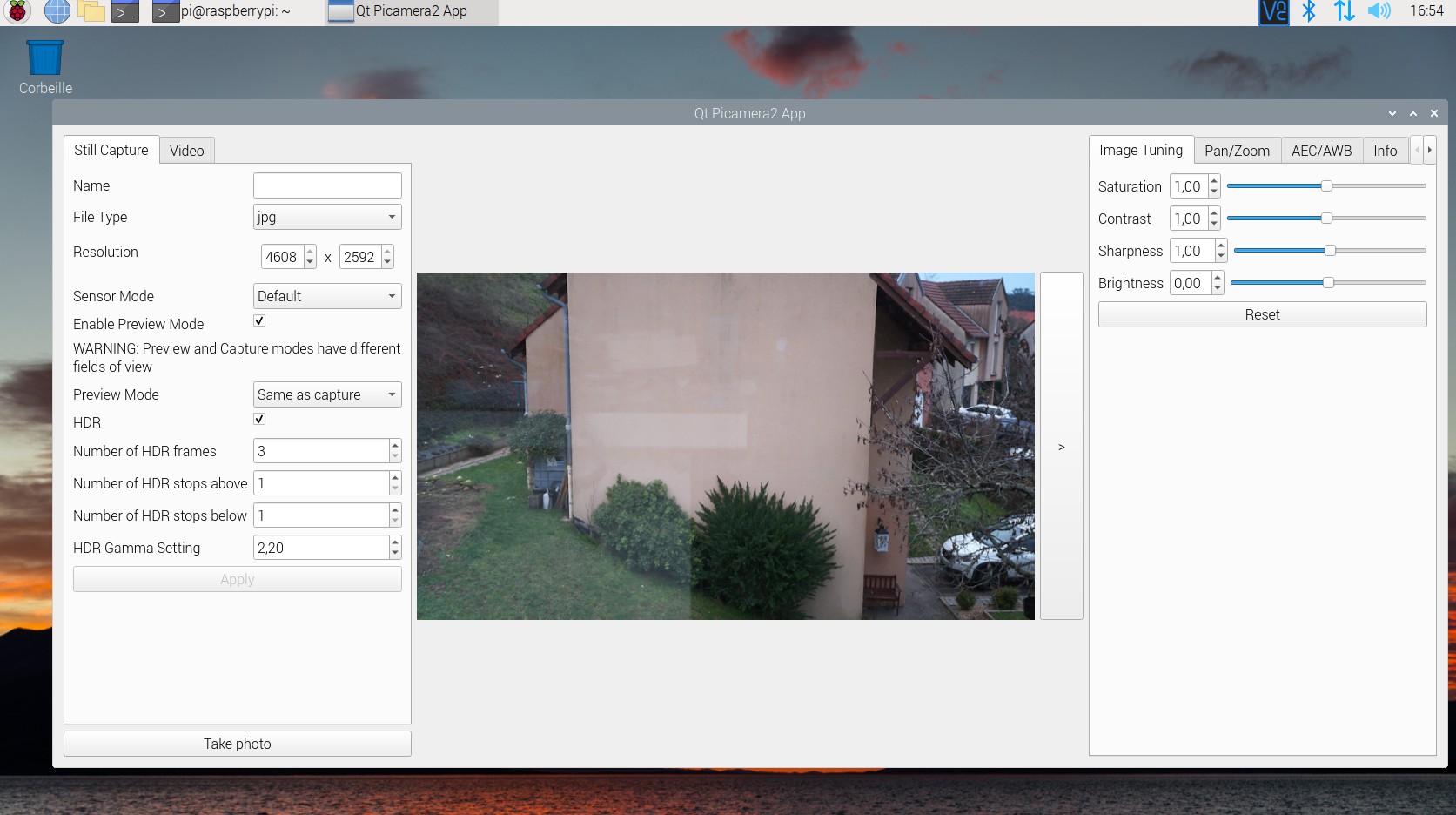
Cette fois c’est bon on accède aux paramètre du HDR, prendre une photo, changer la résolution… . A droite vous pouvez modifier les paramètres de l’image
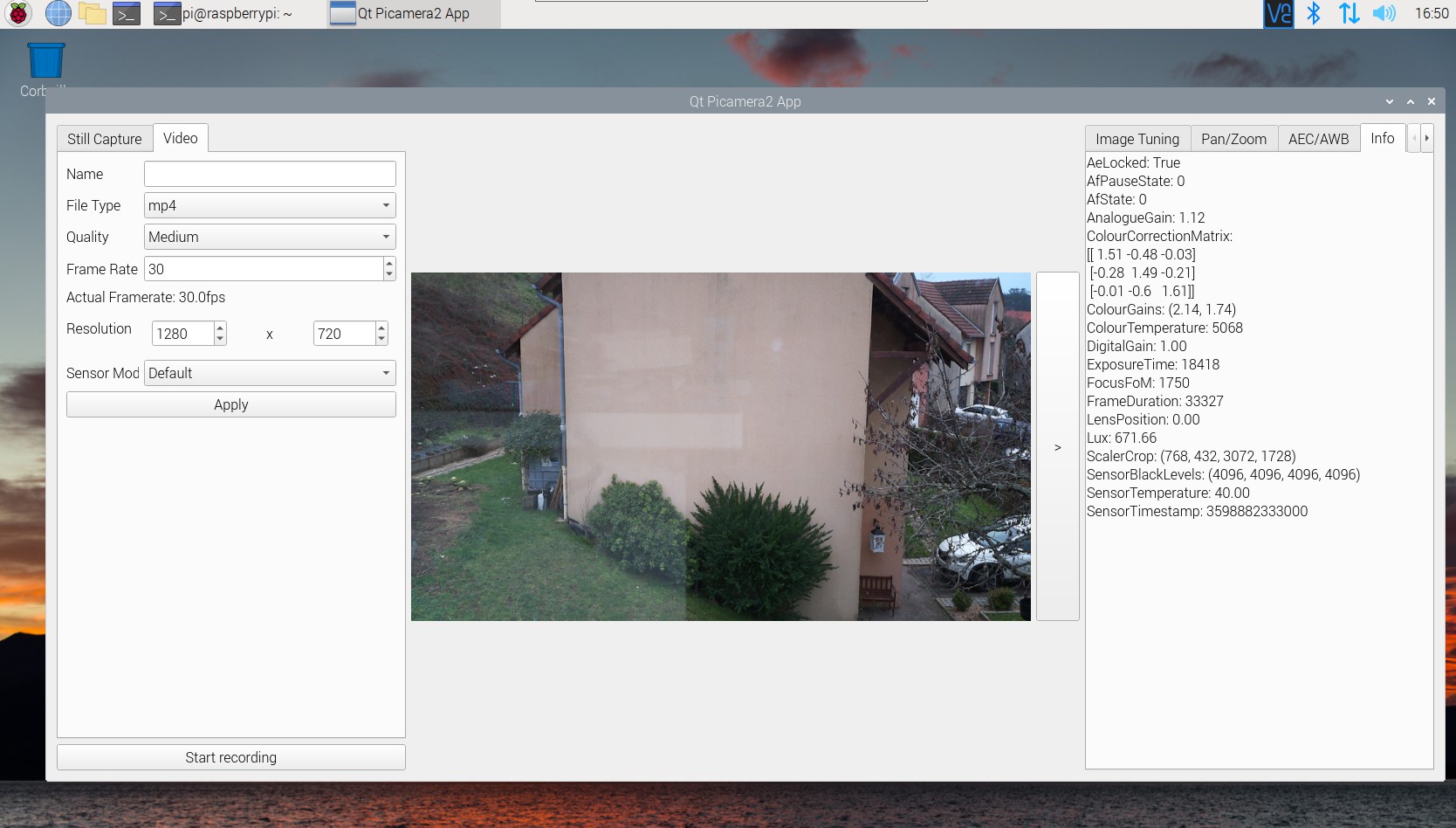 Pour la vidéo il suffit d’ouvrir l’onglet correspondant. On peut également choisir un certain nombre de paramètres, type de fichier, qualité, nombre de trames par seconde, résolution…
Pour la vidéo il suffit d’ouvrir l’onglet correspondant. On peut également choisir un certain nombre de paramètres, type de fichier, qualité, nombre de trames par seconde, résolution…
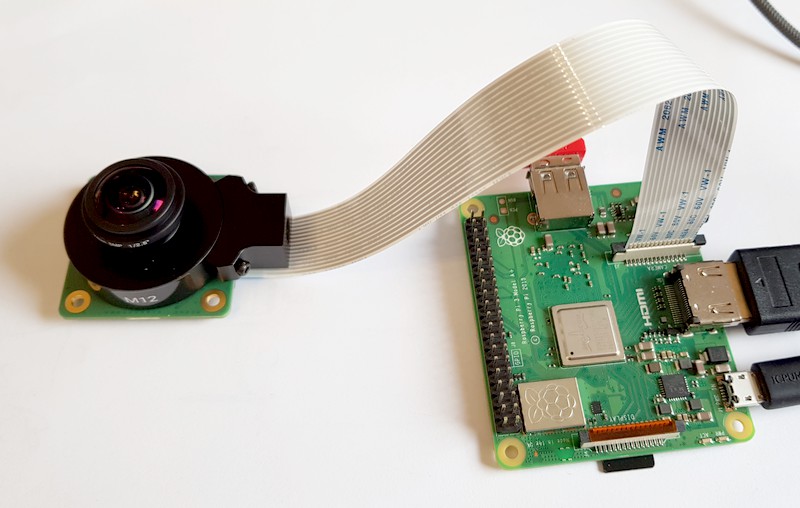
La nouvelle caméra Raspberry Pi HQ avec monture M12
Les objectifs M12
A la demande d’utilisateurs industriels qui ont opté pour la caméra HQ et ont dû ajouter des adaptateurs pour utiliser des objectifs à monture M12, la Fondation Raspberry Pi a sorti cette caméra HQ avec une monture H12, car les objectifs fisheye et autres objectifs spécialisés sont plus facilement disponibles dans ce format.

On trouve des objectifs à focale fixe comme ceux-ci, légèrement moins chers et bien adaptés pour des caméras montées à poste fixe.
 Pour des applications nécessitant des retouches fréquentes les objectifs réglages comme ceux-ci conviennent mieux.
Pour des applications nécessitant des retouches fréquentes les objectifs réglages comme ceux-ci conviennent mieux.
Mes objectifs M12

 |
 |
Pour ma part j’ai quelques objectifs en monture M12 que j’utiliserai pour les tests avec la caméra HQ :
Tests de la caméra HQ
Cette caméra avait déjà fait l’objet d’une série de 3 articles sur le blog lors de sa sortie :
Ce nouveau modèle a des caractéristiques identiques à celle de la caméra d’origine. Simplement elle dispose d’une monture M12 (ou monture type S) au lieu d’une monture C-CS. Vous avez les essais de la caméra dans les articles précédents, je ne vais reprendre que les tests avec quelques objectifs du grand angle au téléobjectif, en monture M12.
Pour rappel on considère comme « normal » ou « standard » un objectif dont la focale correspond (à peu près) à la diagonale de la surface sensible (le capteur pour une caméra). C’est l’objectif de base, il offre une perspective « naturelle », assez similaire à celle de la vision humaine dans la majorité des situations. C’est souvent l’optique qui offre le meilleur rapport qualité/prix, car elle est la plus simple à concevoir. (Source Wikipedia)
La diagonale du capteur mesure 7,85 mm. L’objectif de 8 mm est l’objectif « standard ». Si la focale est plus courte on a un grand angle. Si la focale est plus longue, on a un téléobjectif.
Fish eye 1,7 mm
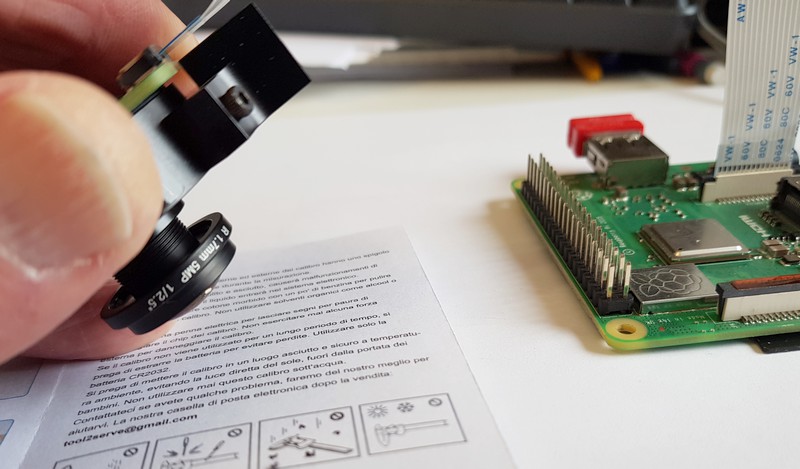
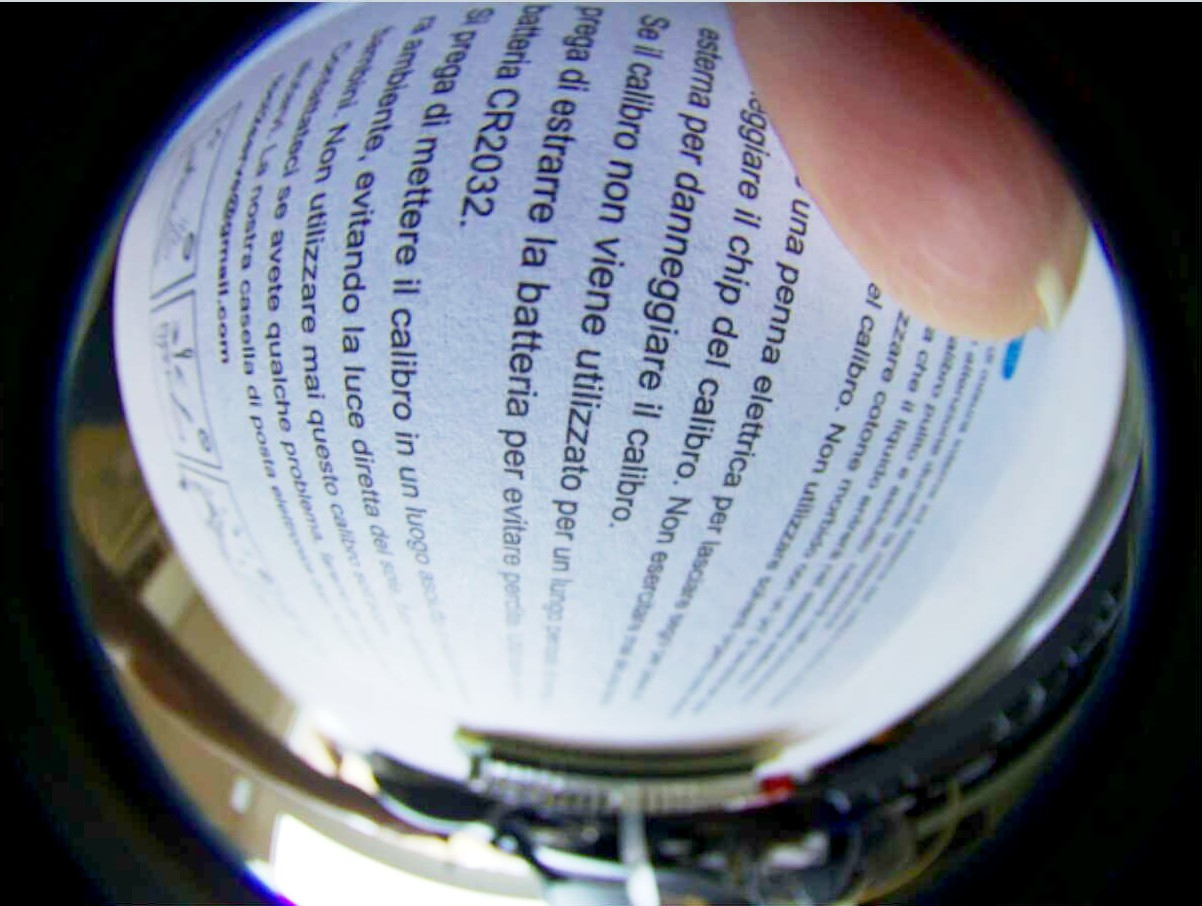 Premier test avec la caméra HQ équipée du Fish eye. Prise de vue sur une notice, la qualité d’image est belle et la mise au point à quelques cm de la feuille ne pose pas de problème (ici il suffit de visser/dévisser l’objectif pour assurer la mise au point.
Premier test avec la caméra HQ équipée du Fish eye. Prise de vue sur une notice, la qualité d’image est belle et la mise au point à quelques cm de la feuille ne pose pas de problème (ici il suffit de visser/dévisser l’objectif pour assurer la mise au point.

 Le fish eye permet de surveiller une zone importante. Le constructeur annonce un champ de 170° ce qui semble bien correspondre. Comme son nom l’indique, il transforme l’image et Il introduit une distorsion qui courbe les lignes droites d’autant plus fortement qu’elles sont loin du centre de l’image. De nombreux programmes et/ou applications permettent de corriger ces déformations.
Le fish eye permet de surveiller une zone importante. Le constructeur annonce un champ de 170° ce qui semble bien correspondre. Comme son nom l’indique, il transforme l’image et Il introduit une distorsion qui courbe les lignes droites d’autant plus fortement qu’elles sont loin du centre de l’image. De nombreux programmes et/ou applications permettent de corriger ces déformations.

Image au format maxi – Cliquez pour agrandir
Photo de l’extérieur (enfin, c’est un fish eye, on voit aussi la fenêtre puisqu’on a un angle de 170°. Cette image fait partie d’une série qui vous montre l’angle couvert par les différents objectifs.
Standard 8mm

Image au format maxi – Cliquez pour agrandir
Bon, les essais de prise de vue se font avec une météo de m… ciel bouché, il pleuviote.
Téléobjectif 25 mm

Image au format maxi – Cliquez pour agrandir
Photo prise au même endroit avec le téléobjectif. La maison sur le haut donne une bonne idée de ce qu’on peut attendre des différents objectifs.
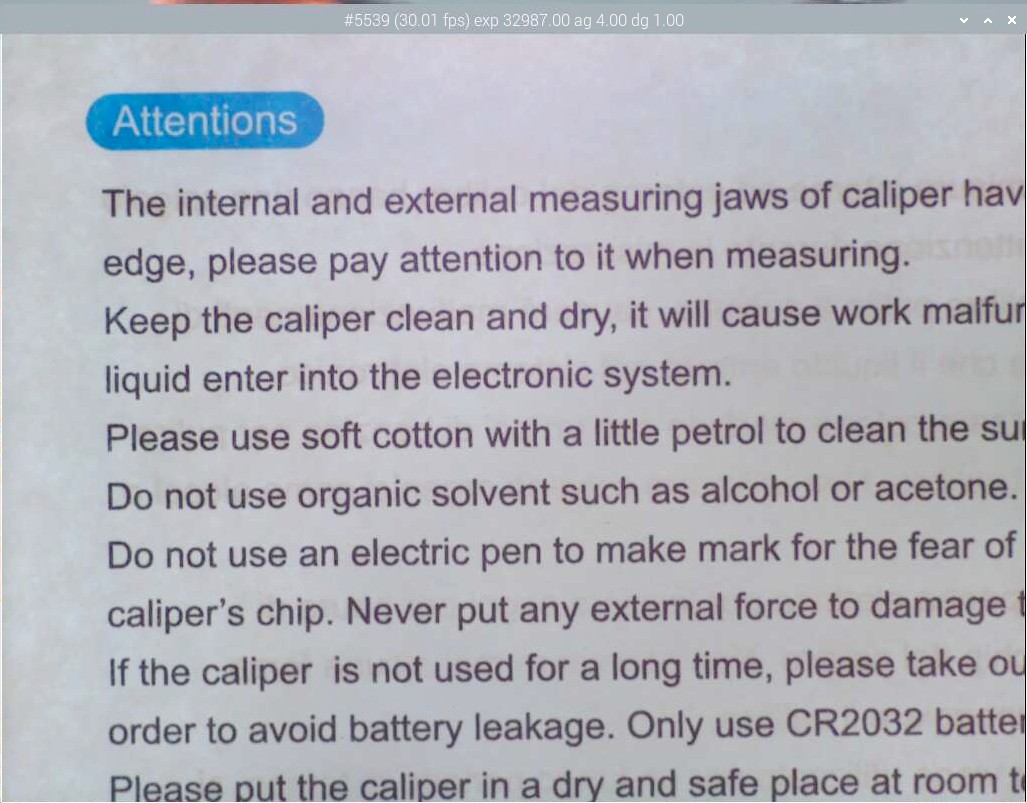
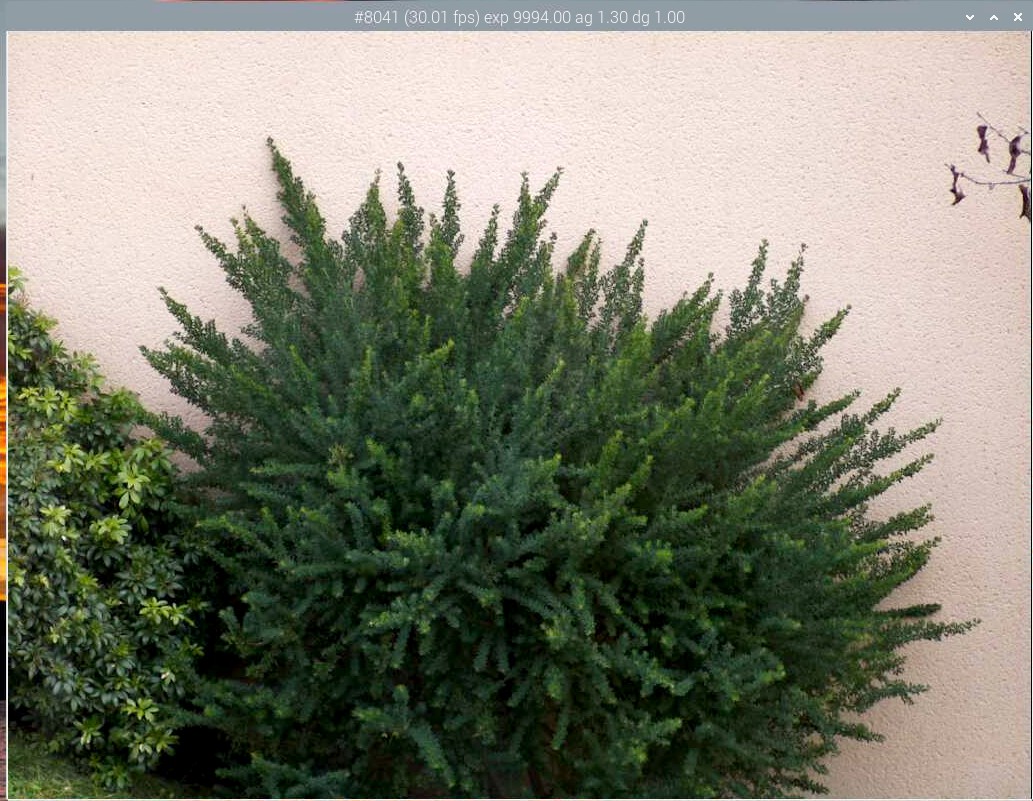 La même notice (à quelques centimètres) ou ce buisson situé à plus de 20 mètres donnent des images tout à fait exploitables. Je ne note pas de déformation ni de vignettage qui empêcherait d’exploiter l’image.
La même notice (à quelques centimètres) ou ce buisson situé à plus de 20 mètres donnent des images tout à fait exploitables. Je ne note pas de déformation ni de vignettage qui empêcherait d’exploiter l’image.
Remarque sur les objectifs M12
C’est peut être dû aux objectifs M12 que j’ai en ma possession, mais ces objectifs ont un petit jeu qui fait bouger l’objectif. En cas d’utilisation précise on règle la netteté et quand on lâche l’objectif il redescend un peu et on perd un peu de précision. De même si on utilise la caméra sur un mobile ou une installation soumise à des vibrations cela risque de poser problème (modification de mise au point, desserrage de l’objectif…). Comme il n’y a pas de vis de blocage sur la monture, je préconise de bloquer l’objectif en place après réglage. Du vernis à ongle, du frein filet devraient faire l’affaire. Attention le frein filet rouge se desserre à haute température, à éviter ici. Le frein filet 222 (violet) à faible résistance devrait trouver sa place ici (je n’ai pas testé)
Les caméras dans MagPi
 Plus d’infos (en Anglais) sur ces caméra dans le numéro 126 de The MagPi que vous pouvez télécharger en cliquant sur ce lien.
Plus d’infos (en Anglais) sur ces caméra dans le numéro 126 de The MagPi que vous pouvez télécharger en cliquant sur ce lien.
Conclusion
Ces modèles de caméra font encore évoluer la gamme Raspberry Pi. Avec une définition de 12Mpx et la mise au point automatique jusqu’à de courtes distances, ce modèles devraient trouver leur place chez les makers.
Pour les applications plus pointues, la caméra HQ peut maintenant recevoir des objectifs M12, ce qui étend fortement la gamme d’utilisation.
Le pilotage des caméras avec PiCamera2 ou libcamera ne pose pas de problème particulier. Certaines fonctionnalités sont encore en cours de développement pour cette nouvelle génération de matériel. Pour en savoir plus, lisez la doc de libcamera et vous trouverez plein d’astuces pour modifier la prise de vue et l’adapter à vos besoins.
Vous trouverez également plein d’autres informations dans les liens sous l’article (rubrique « Sources »).
Ces caméras sont en vente en France chez Kubii, importateur officiel Raspberry Pi.
Les Cameras v3 chez Kubii
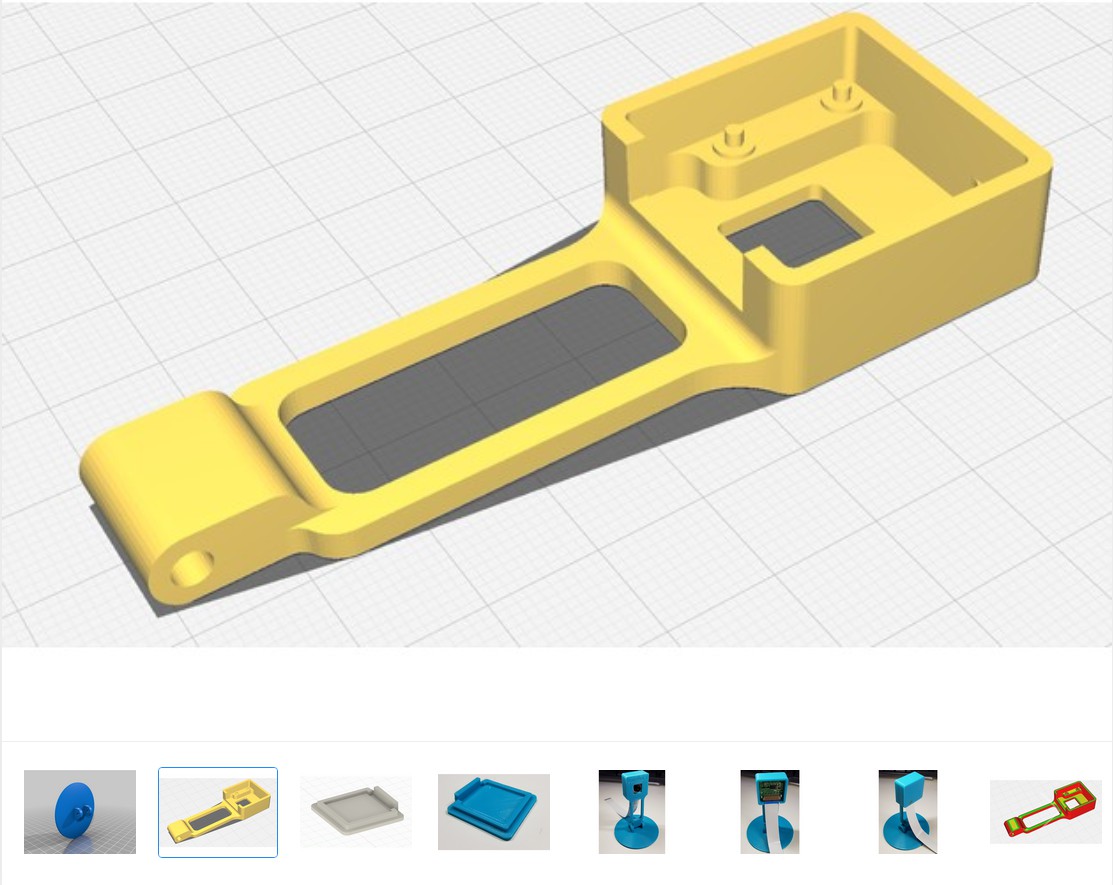
Le boîtier de caméra PiCam v3 est disponible gratuitement sur thingiverse
Vous utilisez déjà ces caméras ? N’hésitez pas à faire part de vos remarques pour les lecteurs de framboise314, les commentaires ci-dessous sont faits pour ça !
Sources
https://www.raspberrypi.com/news/new-autofocus-camera-modules/
- https://datasheets.raspberrypi.com/camera/camera-module-3-product-brief.pdf
- https://github.com/raspberrypi/picamera2
- https://www.raspberrypi.com/documentation/computers/camera_software.html
- https://www.tomshardware.com/how-to/raspberry-pi-camera-module-3-python-picamera-2
https://forums.raspberrypi.com/viewtopic.php?t=323547
https://www.meccanismocomplesso.org/en/picamera-python-how-to-add-text-on-images-and-video/
Ping : Un test complet des nouvelles caméras Raspberry Pi
Bonjour c’est dommage car il n’y a pas de newsletter.
Moi je fais partie d’une association de fablab sur quimper dans le Finistère et nous travaillons sous Linux, l’association s’appelle « Les portes Logiques et le site est « https://lesporteslogiques.net/ »
Ping : Test des nouvelles caméras Raspberry Pi v3 et HQ
Le débit de la camera v3 est très lent . Environ 1 image toutes les 7 a 8 seconde .Elle est montée sur un raspberry pi 4 4 gigas dans un boitier pironman. Y’a t’il une solution a ce problème.
En vous remerciant de cotre éventuelle réponse.
Bonjour
Sur un PI4 sans PironMan c’est correct
je pense que c’est dû au soft qui tourne sur Pironman
j’ai des problèmes de son avec le boîtier et j ai fait une remontée à ce sujet
https://github.com/sunfounder/pironman/issues/5
il apparait qu’il y a un conflit avec lePWM de la LED RVB
vous devriez ouvrir une « issue » au sujet de la vidéo
Auparavant faites une vérification du bon fonctionnement de la caméra sur un PI4 sans Pironman
ou alors sur le PI4 qui est dans le Pironman mais avec une distribution fraiche et SANS INSTALLER leur logiciel
tenez moi au courant
cdt
Francois
Ping : Une nouvelle caméra Raspberry Pi à obturateur global pour vision industrielle - Framboise 314, le Raspberry Pi à la sauce française....
Bonjour,
Je me tâte à utiliser cette nouvelle camera NoIR v3 pour une birdbox, au lieu d’une V2 : distance de focus minimale plus courte, meilleure sensibilité, …
J’ai quelques questions pour lesquelles j’ai du mal à trouver mes réponses car les caméras sont nouvelles, donc je tente ma chance ici ! 🙂
Est-ce que l’AF est désactivable ?
Est-ce que l’AF est bruyant ?
Est-ce que l’AF est stable et efficace en proxy, lorsqu’il est activé ?
Merci d’avance pour vos retours ! 🙂
Bonjour
Oui on peut débrayer l autofocus
https://forums.raspberrypi.com/viewtopic.php?p=2069915#p2069879
Je n ai pas entendu de bruit et le réglage est stable
Cdt
Francois
Bonsoir,
Pour moi impossible à faire fonctionner
Avec ou sans boitier pironman sur un rpi 4b installation logiciel neuve
Cordialement