


Il y a un peu plus de trois ans, je vous présentais déjà la carte NadHAT MK2, basée sur un modem 4G A7682E, imaginée et fabriqué en France par Garatronic et distribuée par McHobby. Cette carte bénéficie d’un support sérieux et de bibliothèques bien suivies, ce qui la distingue de nombreuses productions asiatiques. Aujourd’hui, place à une nouvelle approche : l’utilisation de la NadHAT MK2 avec le Raspberry Pi Pico sous MicroPython !
Au sommaire :
- 1 Ajouter la 4G au Raspberry Pi Pico avec la carte NadHAT MK2 (modem A7682E) en micropython
- 1.1 Chaîne d’alimentation du Raspberry Pi Pico
- 1.2 Connexions d’alimentation : Pico et NadHAT MK2
- 1.3 Installer proprement MicroPython sur le Raspberry Pi Pico
- 1.4 Configurer Thonny et vérifier la connexion avec le Raspberry Pi Pico
- 1.5 Qu’est-ce que le REPL ?
- 1.6 Installer les bibliothèques MicroPython pour la NadHAT MK2
- 1.7 Attention !
- 1.8 Le projet : un Pico qui reçoit des SMS et change de couleur
- 1.9 Montage NadHAT MK2 × Raspberry Pi Pico (4G + OLED + WS2812)
- 1.10 QRCODE pour commander les couleurs
- 1.11 Vidéo
- 1.12 Sources
Ajouter la 4G au Raspberry Pi Pico avec la carte NadHAT MK2 (modem A7682E) en micropython
Avant de plonger dans l’utilisation de la carte NadHAT MK2 avec le Raspberry Pi Pico, prenons un instant pour revenir sur les bases de cette petite carte microcontrôleur. Comprendre comment elle gère son alimentation, ses broches et ses différents modes de fonctionnement facilitera grandement la mise en œuvre du modem 4G ensuite.
Chaîne d’alimentation du Raspberry Pi Pico
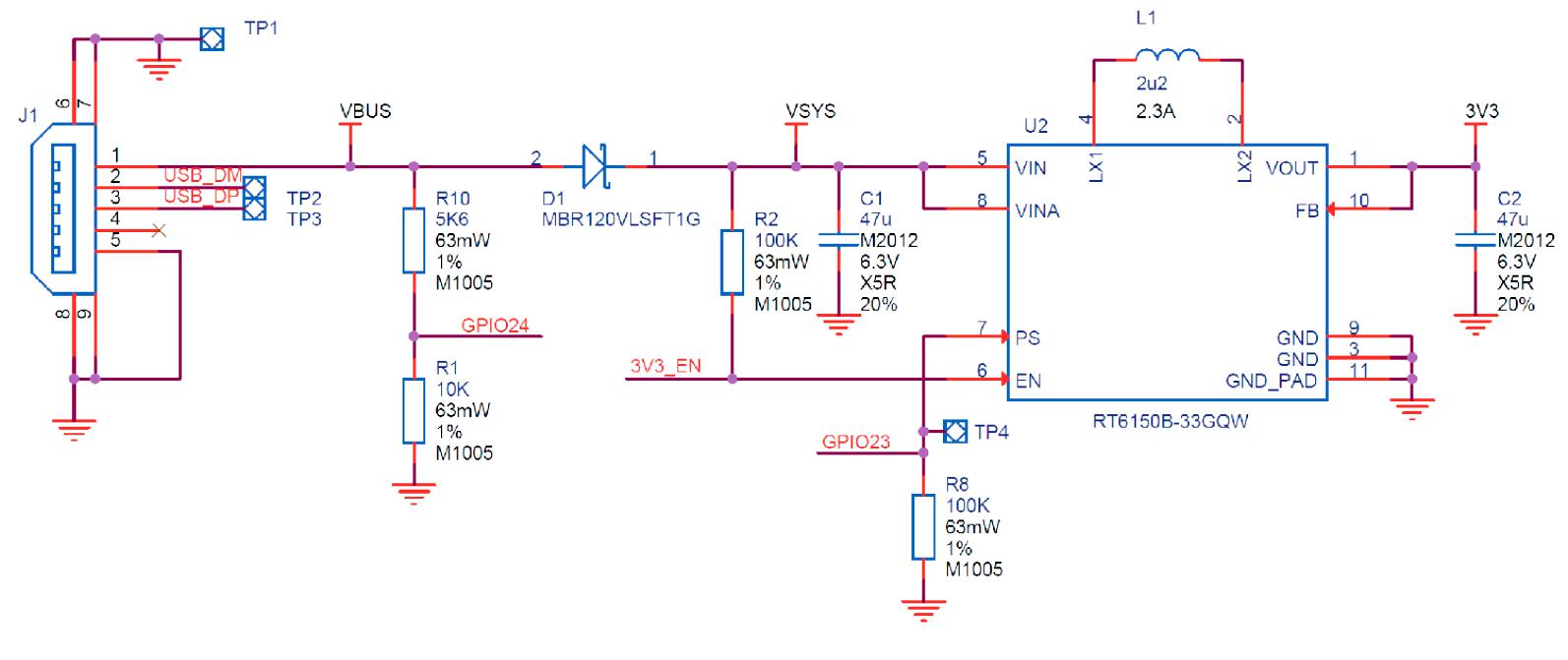
Le Raspberry Pi Pico dispose d’une architecture d’alimentation à la fois simple et ingénieuse.
L’entrée VBUS (5 V issue du port micro-USB) passe à travers une diode Schottky (D1) pour produire VSYS, la tension principale du système. Cette diode permet de sélectionner automatiquement la meilleure source d’alimentation (USB, batterie ou autre) sans risque de retour de courant entre elles.
Le convertisseur RT6150B assure ensuite la régulation à 3,3 V, tension utilisée par le microcontrôleur RP2040 et ses entrées/sorties. Grâce à son fonctionnement buck-boost, il maintient cette tension stable pour une tension d’entrée comprise entre environ 1,8 V et 5,5 V, ce qui offre une grande flexibilité dans le choix de la source d’énergie.
Le GPIO24 détecte la présence du 5 V USB, tandis que le GPIO23 commande le mode d’économie d’énergie du régulateur. Enfin, la broche 3V3_EN, reliée à la pin 37, permet de désactiver le convertisseur pour placer le Pico en veille à très basse consommation.
💬 La carte intègre aussi un pont diviseur relié à VSYS, permettant de mesurer la tension d’alimentation (ou celle de la batterie) sur GP29 / ADC3. Cette entrée fournit une valeur divisée par 3, ce qui permet de suivre l’état de la batterie sans aucun câblage supplémentaire.
Connexions d’alimentation : Pico et NadHAT MK2
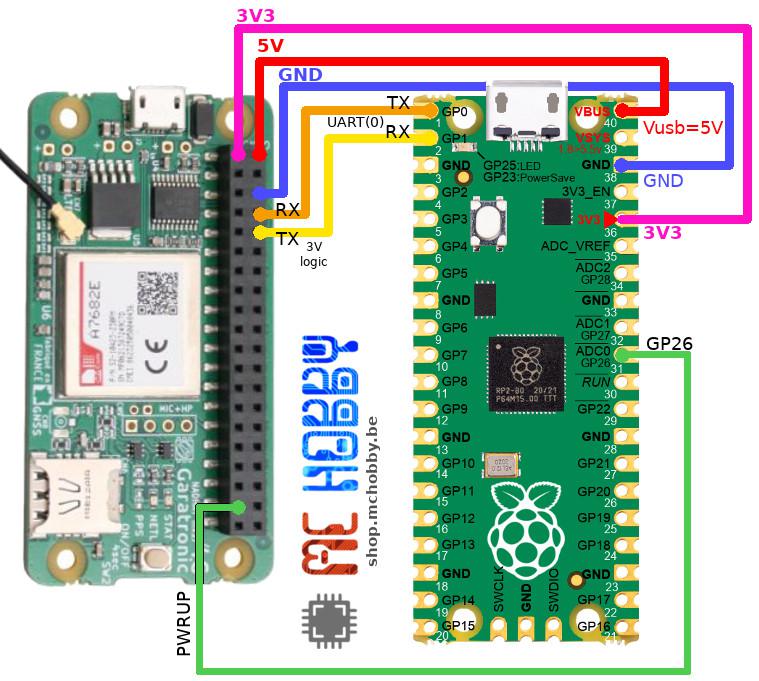
A titre d’exemple voici comment Dominique (McHobby) connecte le Raspberry Pi PICO et la carte NadHAT MK2.
Le Raspberry Pi Pico peut être alimenté de plusieurs façons, mais la plus simple consiste à injecter du 5 V sur la broche VBUS, exactement comme s’il était branché en USB. Dans notre montage, la sortie du convertisseur élévateur qui porte la tension batterie (VBatt) à 5 V est donc reliée à cette entrée VBUS. Le Pico se comporte alors comme si le 5 V venait d’un câble USB, sans rien changer à son fonctionnement interne.
La carte NadHAT MK2 demande quant à elle deux alimentations distinctes : le 5 V, utilisé pour la partie puissance du modem 4G SIMCom A7682E, et le 3,3 V, qui alimente l’interface logique (UART et signaux de contrôle). C’est pour cette raison que l’on connecte à la fois le +5 V provenant de VBUS ou du convertisseur) et le +3,3 V (fourni par le régulateur du Pico). Le 5 V fait fonctionner le modem, tandis que le 3,3 V garantit la compatibilité des niveaux logiques entre le Pico et la NadHAT MK2.
Installer proprement MicroPython sur le Raspberry Pi Pico
Avant d’utiliser la carte NadHAT MK2, nous allons repartir d’un Raspberry Pi Pico remis à plat, avec une version propre et à jour de MicroPython.
Remettre le Pico en mode « bootloader »
- Débranchez le Pico de l’USB.
- Appuyez sur le bouton BOOTSEL et maintenez-le enfoncé.
- Tout en gardant le bouton enfoncé, branchez le câble USB au PC.
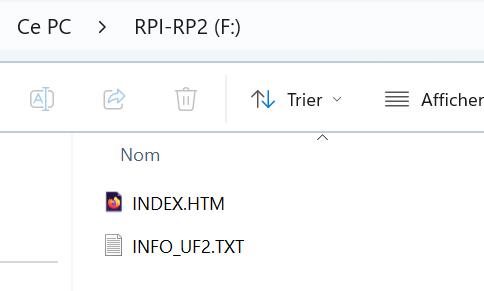
- Relâchez le bouton : le Pico apparaît alors comme une clé USB nommée
RPI-RP2.
À ce stade, peu importe ce qu’il contenait auparavant (CircuitPython, ancien MicroPython, UF2 personnalisé) : on repart sur une base saine.
Télécharger le firmware MicroPython adapté
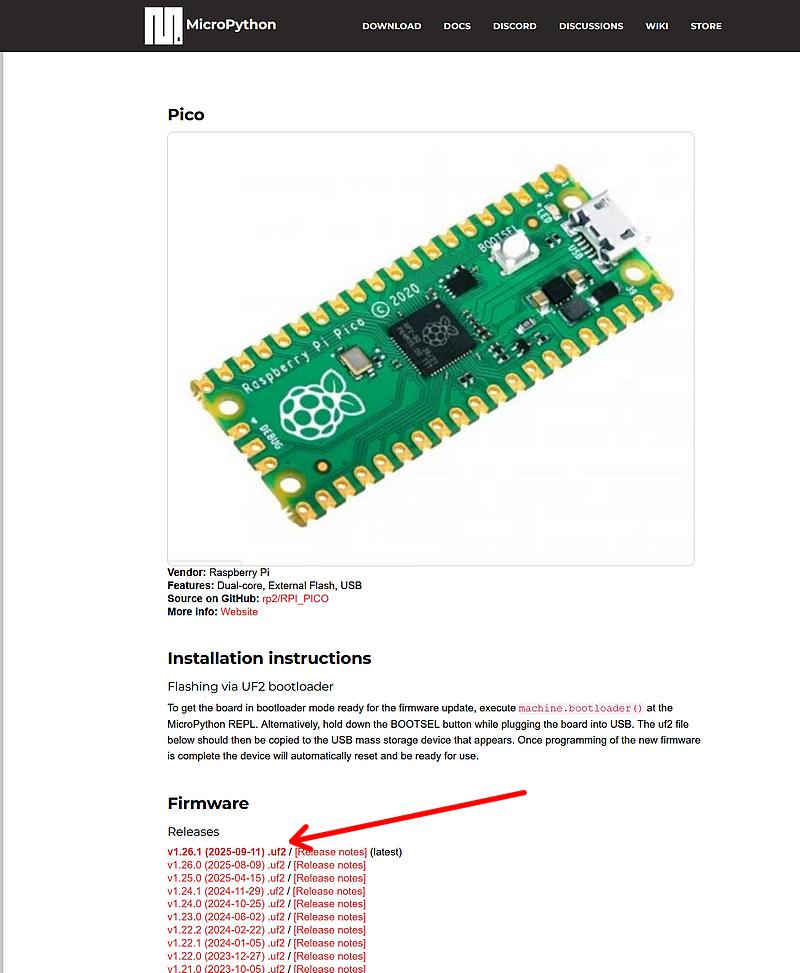
Les variantes se trouvent sur la page Download MicroPython. Choisissez la version qui correspond à votre modèle de Raspberry Pi PICO.
Pour ce projet, on utilise le firmware officiel MicroPython pour le Raspberry Pi Pico (RP2040) sans Wi-Fi. Choisissez la dernière version (latest)
- Nom du fichier : RPI_PICO-20250911-v1.26.1.uf2
- Disponible sur le site officiel de MicroPython.
Copier le firmware sur le Pico
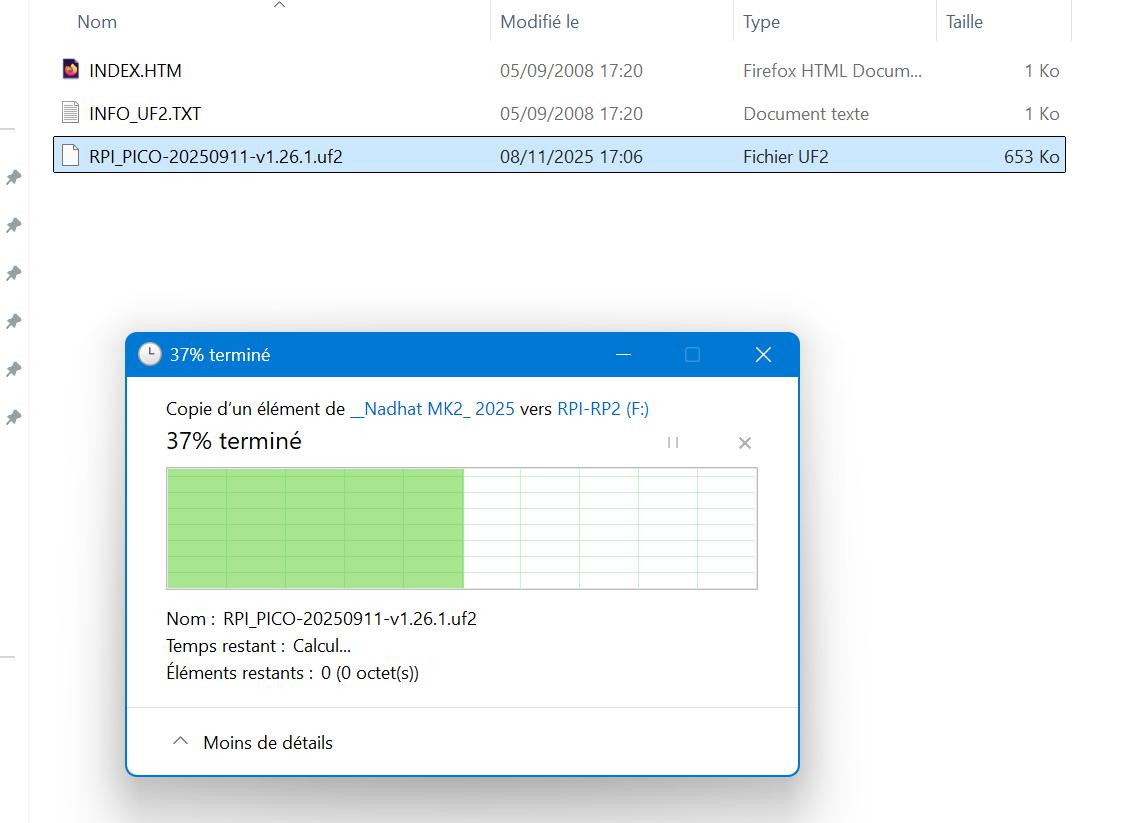
- Ouvrez le lecteur
RPI-RP2apparu sur votre ordinateur. - Glissez-déposez le fichier
.uf2de MicroPython dans cette fenêtre. - Le Pico redémarre automatiquement : le lecteur disparaît et MicroPython est installé.
À partir de là, le Pico est prêt à être utilisé avec un REPL MicroPython (via un terminal série ou Thonny), ce qui servira de base pour dialoguer ensuite avec la NadHAT MK2.
Configurer Thonny et vérifier la connexion avec le Raspberry Pi Pico
Une fois MicroPython installé sur le Pico, il faut établir la communication entre la carte et l’ordinateur pour accéder à l’interpréteur REPL. C’est par ce canal série que l’on enverra les commandes et les programmes au Pico.
Repérer le port série du Pico
Branchez le Pico à l’ordinateur via le câble USB (sans appuyer sur BOOTSEL cette fois).
Ouvrez ensuite le Gestionnaire de périphériques de Windows.
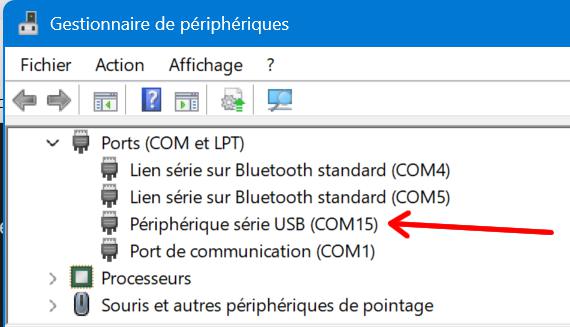
Dans la section Ports (COM et LPT), vous devriez voir apparaître une nouvelle ligne du type :
|
1 |
USB Serial Device (COM15) |
Notez le numéro de port (COM15 dans cet exemple) : c’est celui que nous allons indiquer dans Thonny. Sur Linux ou macOS, le port apparaîtra généralement comme
/dev/ttyACM0 ou /dev/tty.usbmodem*.
Configurer Thonny pour MicroPython
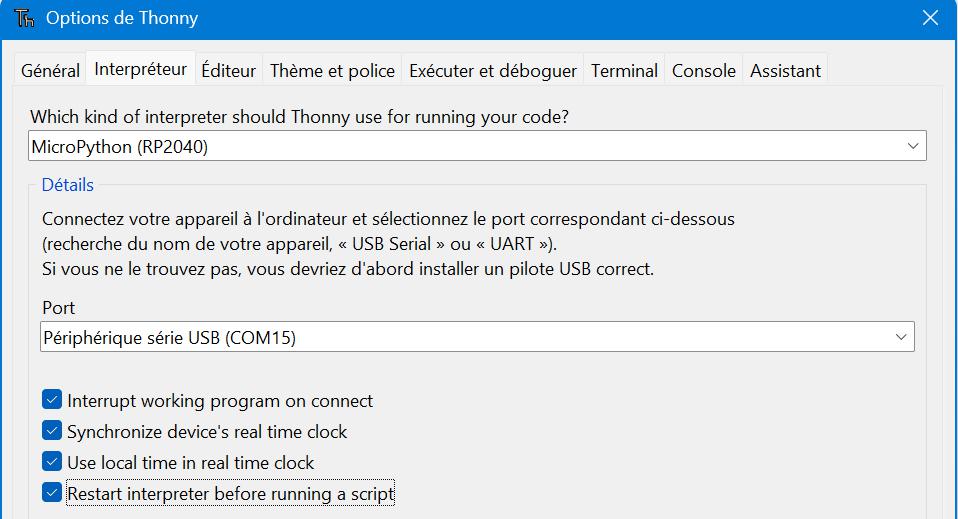
Lancez l’éditeur Thonny, puis ouvrez le menu Exécuter → Sélectionner l’interpréteur….
Dans la fenêtre qui s’affiche :
- Sélectionnez MicroPython (RP2040) dans la liste.
- Choisissez le port série repéré précédemment (ex.
COM15). - Validez avec OK.
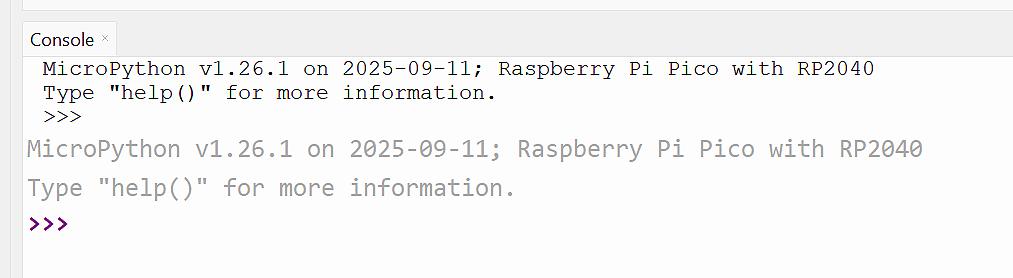
Dans la console inférieure de Thonny, un message du type MicroPython v1.xx on 202x-xx-xx; Raspberry Pi Pico with RP2040
doit apparaître, suivi de l’invite >>>.
Cela signifie que la communication avec le Pico est établie.
Vérifier le fonctionnement du REPL
Dans la console de Thonny, tapez :
|
1 |
print("Bonjour depuis le Pico!") |
Si le message s’affiche immédiatement en dessous, tout est en ordre !
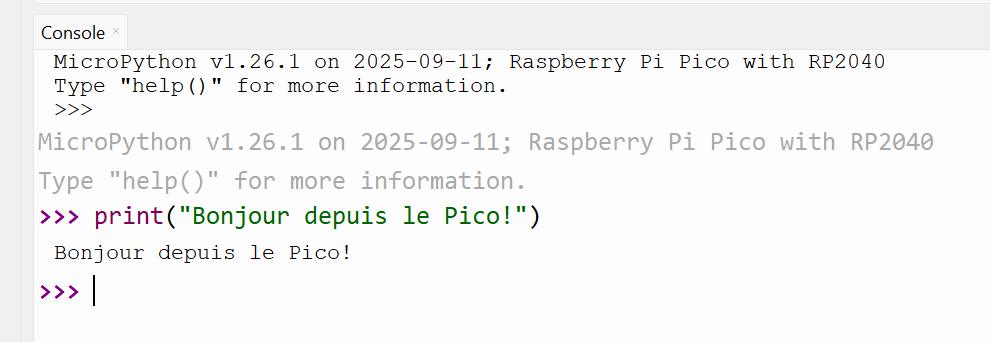
Vous êtes connecté au REPL MicroPython et prêt à programmer le Pico.
💬
Qu’est-ce que le REPL ?
Le REPL (pour Read – Evaluate – Print Loop) est l’interpréteur interactif de MicroPython.
C’est une console qui lit vos commandes, les exécute sur le Pico, puis affiche le résultat en direct.
En pratique, c’est l’endroit où vous pouvez tester une ligne de code, exécuter une fonction ou vérifier une variable sans écrire de programme complet. Le REPL est particulièrement pratique pour déboguer et pour découvrir pas à pas le comportement d’un module comme la NadHAT MK2.
Dans Thonny, la console inférieure joue ce rôle : tout ce que vous y tapez est envoyé directement au Pico comme dans l’exemple :
|
1 2 |
>>> print("Bonjour Pico !") Bonjour Pico ! |
Nous allons pouvoir passer à la suite : l’installation des bibliothèques nécessaires à la carte
NadHAT MK2 et la communication série avec le modem 4G.
Installer les bibliothèques MicroPython pour la NadHAT MK2
Pour piloter le modem 4G NadHAT MK2 depuis le Raspberry Pi Pico, il faut d’abord installer les bibliothèques MicroPython adaptées. Elles permettent de communiquer facilement avec le module SIMCom A7682E sans réinventer toute la partie AT commands.
La solution la plus simple consiste à utiliser le gestionnaire de paquets intégré à MicroPython, mip, ou l’outil mpremote si vous préférez travailler en ligne de commande.
⚠️
Attention !
Avant d’utiliser mpremote, pensez à fermer Thonny s’il est ouvert.
L’éditeur garde le port série COM occupé tant qu’il est connecté au Pico, ce qui empêche toute autre application (comme mpremote) d’y accéder.
Une fois l’installation terminée, vous pourrez rouvrir Thonny pour vérifier les fichiers sur le Pico.
Installation avec mpremote
Si mpremote n est pas sur votre ordinateur installez le :
Ouvrez un terminal (ou PowerShell) et saisissez :
|
1 |
python -m pip install mpremote |
|
1 |
mpremote --version |
Vous devriez obtenir
|
1 2 |
PS C:\Users\conta> mpremote --version mpremote 1.26.1 |
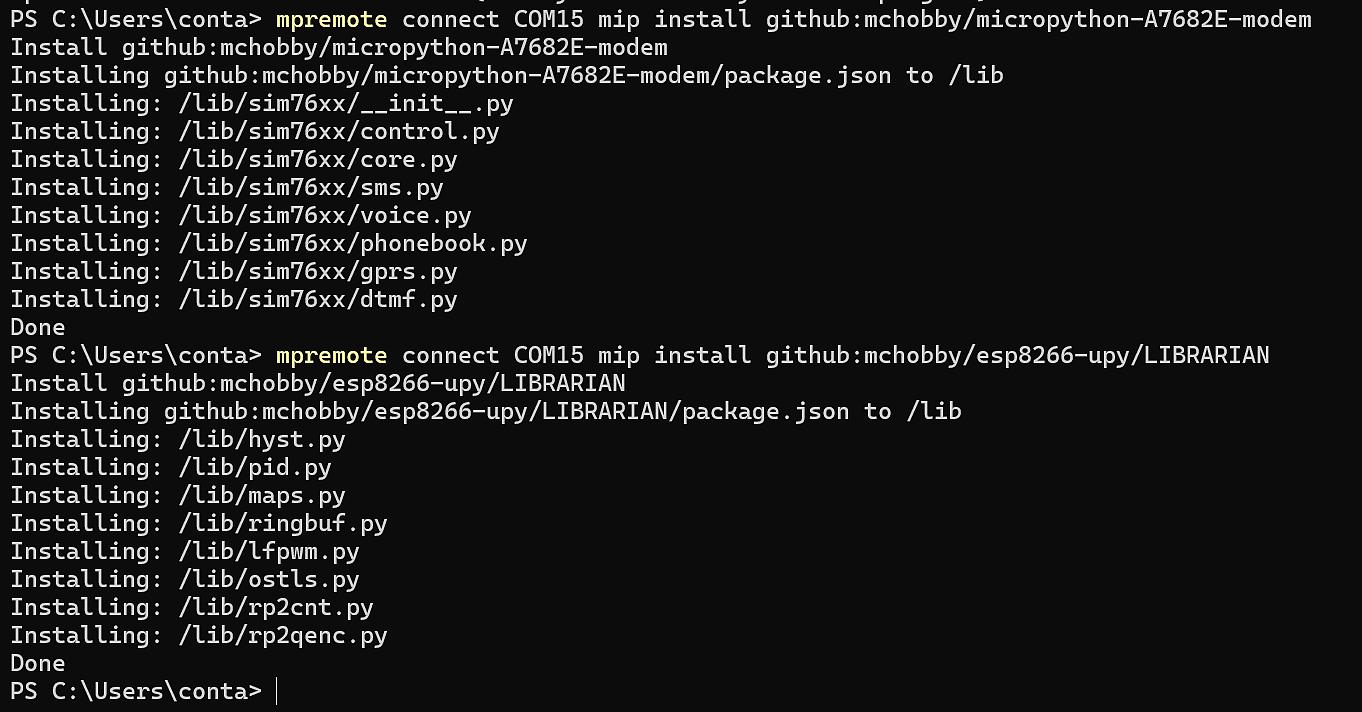
Maintenant saisissez :
|
1 2 |
mpremote connect COM15 mip install github:mchobby/micropython-A7682E-modem mpremote connect COM15 mip install github:mchobby/esp8266-upy/LIBRARIAN |
Cette méthode télécharge et installe directement les bibliothèques sur le Pico. Elle est pratique si vous avez déjà mpremote configuré sur votre ordinateur.
ℹ️ Sur le Raspberry Pi Pico (sans Wi-Fi), la commande mip.install() ne peut pas fonctionner, car la carte ne dispose pas d’accès réseau.
Utilisez plutôt mpremote depuis votre ordinateur pour installer les bibliothèques.
Vérifier l’installation
Dans Thonny, ouvrez le panneau Fichiers → Raspberry Pi Pico.
Vous devriez voir un dossier lib/sim76xx contenant les fichiers de la bibliothèque modem,
ainsi que plusieurs fichiers .py supplémentaires dans lib
(hyst.py, maps.py, ringbuf.py, etc.).
Ces fichiers correspondent à la bibliothèque LIBRARIAN.
L’ensemble fournit les fonctions nécessaires pour initialiser le modem, envoyer des commandes AT, gérer les SMS et la connexion au réseau 4G.
Le projet : un Pico qui reçoit des SMS et change de couleur
Pour illustrer l’utilisation de la carte NadHAT MK2 avec le Raspberry Pi Pico, nous allons réaliser une petite application amusante et visuelle. Le principe est simple : le visiteur envoie un SMS au numéro de la carte MK2. Si le message contient du texte, celui-ci s’affiche sur l’écran relié au Pico. Si le contenu du SMS correspond à une couleur (par exemple « rouge », « vert », « bleu »…), le programme affiche le texte sur l’écran et allume une LED WS2812 dans la couleur demandée. De quoi montrer, en quelques lignes de code MicroPython, comment recevoir un SMS, le décoder et piloter à la fois un affichage et un élément lumineux adressable.
L’application peut aller encore plus loin. Une fois la réception de SMS fonctionnelle, rien n’empêche le Pico de répondre automatiquement à l’expéditeur ! Par exemple, il pourrait confirmer la couleur allumée (« LED rouge activée »), envoyer un message de bienvenue, ou encore retourner l’heure et la tension de la batterie.
On peut aussi ajouter un petit compteur de SMS reçus dans la journée : à chaque nouveau message, le Pico incrémente une variable et affiche le total sur l’écran ou dans le journal série. Un bon moyen de démontrer la communication bidirectionnelle entre le Pico et le réseau 4G, tout en restant dans un programme simple et ludique.
Montage NadHAT MK2 × Raspberry Pi Pico (4G + OLED + WS2812)
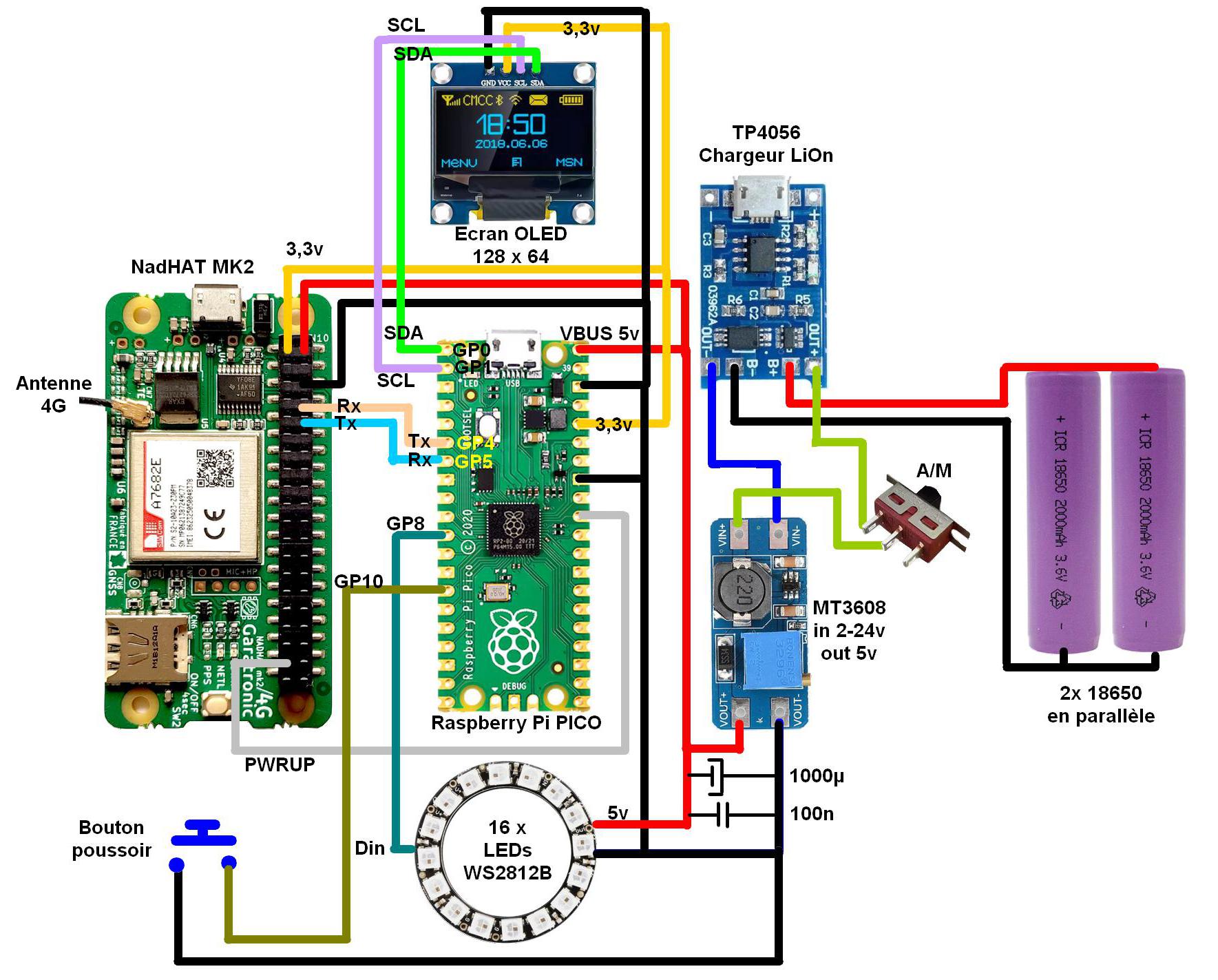
Architecture générale
- Alimentation : deux cellules 18650 en parallèle (3,7 V nominal) rechargées par un TP4056.
- Régulation : MT3608 élève la tension batterie vers 5 V pour le Pico, le modem 4G et l’anneau LED.
- Interrupteur A/M : coupe la sortie 5 V du MT3608 pour isoler la logique.
Cœur du système
Le Raspberry Pi Pico pilote le NadHAT MK2 (modem 4G SIMCom A7682E), l’écran OLED SSD1306 et un anneau 16 LEDs WS2812B. Le tout fonctionne en MicroPython (réception/envoi de SMS, analyse du texte, animation LED et affichage).
Connexions principales (GPIO Pico)
| Fonction | GPIO Pico | Détails |
|---|---|---|
| UART modem 4G | GP4 (TX) → RX modem GP5 (RX) ← TX modem |
UART1 |
| PWRUP modem | GP26 | Impulsion type « Power » (PWRKEY) |
| OLED SSD1306 (I²C0) | GP0 (SDA), GP1 (SCL) | 128×64, 3,3 V |
| Anneau WS2812B | GP8 (DIN) | Alim 5 V commune |
| Bouton poussoir | GP10 | Entrée avec pull-up |
| Alimentation logique | 5 V (VBUS) | Issue du MT3608 |
Affichage OLED
- Date & heure synchronisées réseau 4G (mise à jour périodique).
- Compteur de SMS : jour / total.
- N° expéditeur : quatre derniers chiffres.
- Texte du message : tronqué ou défilant si nécessaire.
Analyse SMS & LEDs
- Normalisation du texte : trim, minuscules, suppression des accents/espaces.
- 1 couleur reconnue : affichage sur tout l’anneau (effet de suivi).
- 2 couleurs : SMS retour « une couleur uniquement est permise ».
- Aucune couleur : SMS retour horodaté de courtoisie.
Autonomie mesurée
Fonctionnement continu du 11/11 à 14 h 30 au 12/11 à 7 h 30, soit environ
17 heures d’autonomie avec modem 4G et OLED actifs.
Téléchargement
Le programme complet (MicroPython) est fourni en archive .zip vous pouvez le télécharger ici.
QRCODE pour commander les couleurs
Et pour aller plus loin : les QR codes SMS
Afin de simplifier l’interaction avec le système, il est tout à fait possible de générer des QR codes contenant une commande SMS prédéfinie. Lorsqu’un visiteur scanne le code avec son
smartphone, son application de messagerie s’ouvre automatiquement avec le numéro de la carte NadHAT et le texte du message déjà rempli (par exemple : « rouge », « bleu », « jaune »…).

Cette approche se révèle très pratique lors d’une démonstration ou d’un salon : pas besoin de
taper le numéro ni le texte, un simple scan suffit pour envoyer la commande.
En pratique, il suffit de créer des QR codes du type :
SMSTO:07xxxx3993:rouge → le téléphone proposera l’envoi direct du SMS au bon destinataire.
On peut ainsi imaginer plusieurs QR codes imprimés (un par couleur ou par action), permettant
de déclencher instantanément un effet lumineux ou une commande à distance.
L’expérience devient plus fluide, plus intuitive et surtout accessible à tous les publics, même ceux peu familiers avec la technologie.
Vidéo
Conclusion
Cette réalisation démontre avant tout le bon fonctionnement de la carte NadHAT MK2, un produit conçu et fabriqué en France par Garatronic. Solide, bien pensée et parfaitement adaptée au Raspberry Pi Pico, elle offre une connectivité 4G stable et fiable, sans aucune complication matérielle.
L’emploi de la bibliothèque MicroPython développée par MCHobby simplifie considérablement le travail : la gestion du modem, l’envoi et la réception des SMS ou la récupération de la date et de l’heure réseau deviennent de simples appels de fonctions. Il est alors facile de bâtir un programme complet, lisible et évolutif.
Si le montage présenté ici n’a pas d’utilité directe au quotidien, il illustre néanmoins tout le potentiel de ce duo Pico + NadHAT. Dans une habitation isolée, un chalet ou une résidence secondaire dépourvue d’Internet, un tel dispositif pourrait permettre de piloter à distance divers équipements par SMS : ouverture d’un portail, activation d’un chauffage, éclairage d’extérieur, ou encore surveillance d’un capteur d’intrusion.
Les possibilités sont nombreuses : il suffirait d’ajouter quelques relais, sondes ou capteurs pour transformer ce prototype en véritable système de télécommande et télésurveillance autonome, fonctionnant sur batterie et communicant via le réseau 4G. Un excellent point de départ pour des projets domotiques ou industriels simples, robustes et surtout déconnectés du cloud.
Sources
https://github.com/mchobby/micropython-A7682E-modem
https://arduino103.blogspot.com/2025/02/utiliser-un-module-4g-lte-simcom-a7682e.html
Carte GSM 4G/LTE Nadhat MK2 – USB et HAT Raspberry Pi avec SimCom A7682E
Bonjour François,
Encore un très chouette article.
Merci !
Stéphane
Bonjour,
Merci pour cet article, c’est top ! S’il y a des MMS, je signe immédiatement.
@+
Bonjour
non malheureusement avec ce modèle on n ‘a pas accès aux MMS.
On en a discuté avec Frédéric, le créateur de la carte
la prochaine version devrait permettre d envoyer des MMS
cdt
francois