


Tête de prise de vue Gigapi
Les photographes, depuis le passage au numérique, ont adopté l’ordinateur pour piloter leurs prise de vues. Souvent confiée à un Mac, de plus en plus à un PC, voici que notre framboise314 s’immisce dans le monde de la photographie. Tim et Jack Stocker l’ont mise à contribution pour réaliser une tête de prise de vue Gigapixel (GigaPi). Un rêve de photographe, prendre une vue de plusieurs giga pixels, qui permet d’agrandir une petite partie de l’image des centaines de fois…Un exemple sera plus parlant que bien des blablas :

Panoramique : 2,79 Giga pixels soit 288 images (36 images en largeur, 8 en hauteur)
Repérez le petit rectangle jaune, au dessus du pont… Vous l’avez vu ? et bien si on zoome dessus, on peut observer un aérodrome…
 Ce panoramique a été mis en ligne le 5 mai, allez voir par vous même ! Un système de navigation « à la Google » vous permet de naviguer sur l’image et de zoomer. Comme l’image est constitué de 288 photos prises par un Lumix FZ100 (14 Mpx, zoom optique 24x équivalent à 25-600 mm) qui ont été assemblées en mosaïque, il est possible de zoomer jusqu’à avoir la définition maximale sur chaque partie de l’image.
Ce panoramique a été mis en ligne le 5 mai, allez voir par vous même ! Un système de navigation « à la Google » vous permet de naviguer sur l’image et de zoomer. Comme l’image est constitué de 288 photos prises par un Lumix FZ100 (14 Mpx, zoom optique 24x équivalent à 25-600 mm) qui ont été assemblées en mosaïque, il est possible de zoomer jusqu’à avoir la définition maximale sur chaque partie de l’image.
Tim et Jack ont décrit la réalisation de cette tête panoramique pilotée par le Raspberry Pi. Après le watercooling pour le Raspberry Pi, joli mais peu utile, nous avons cette fois une tête panoramique superbe ET utile !
La base pour le mouvement de rotation horizontal, est un niveau à laser dégotté sur internet pour 20£ (24€). La base est parfaite pour cet usage, et fournie avec le trépied… Tim et Jack ont motorisé cette base en lui ajoutant un moteur pas-à-pas équipé d’une vis sans fin. Ce moteur fait un tour en 64 pas, et comporte une démultiplication 1:64 intégrée.
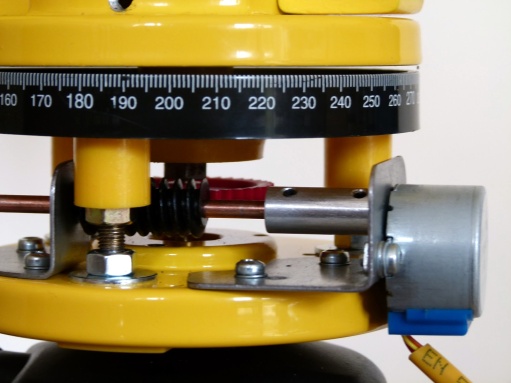
Commande de rotation de la base
Pour la rotation verticale, ils ont réalisé, à la scie sauteuse, une tête en MDF (Medium Density Fiberboard) ou panneau de fibres à densité moyenne -appelé aussi Médium-, équipée de pièces Lego pour la rotation. Cette pièce a été peinte en jaune, comme la tête de rotation du niveau laser. Le point de rotation horizontal et vertical est placé à la pupille d’entrée de l’appareil photo.

Tête panoramique brute de découpe, équipée des pièces Lego pour la rotation verticale

Tête panoramique peinte, équipée de la platine destinée à accueillir le boîtier de l’appareil photo, et du moteur pas-à-pas assurant la rotation verticale
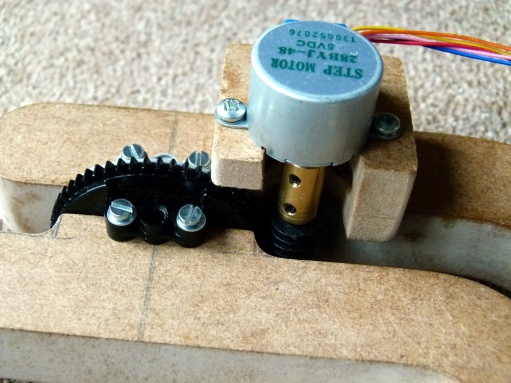
Montage du moteur Pas-à-pas assurant la rotation verticale
Côté électronique de commande, le Raspberry Pi a été muni d’une carte de pilotage de moteurs pas-à-pas, dont les sorties sont reliées à des prises RJ45, pour faciliter la connexion/déconnexion des moteurs.
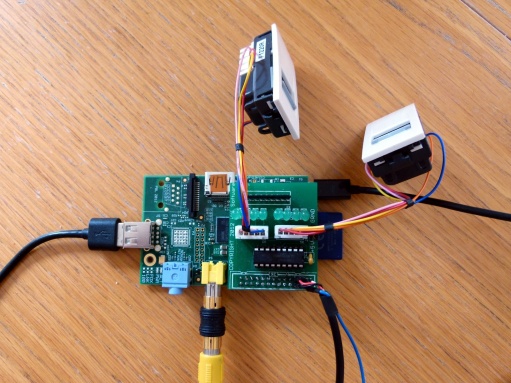
Le Raspberry Pi équipé de la carte de commande de moteurs pas-à-pas dont les sorties se font sur deux RJ45
Pour la commande de l’appareil, deux relais sont utilisés, un pour contrôler la fonction mise au point/exposition et l’autre pour le déclencheur. Les relais ferment le circuit sur les câbles de télécommande, à commencer par la fonction de mise au point/exposition et l’obturateur se déclenche une fraction de seconde plus tard.
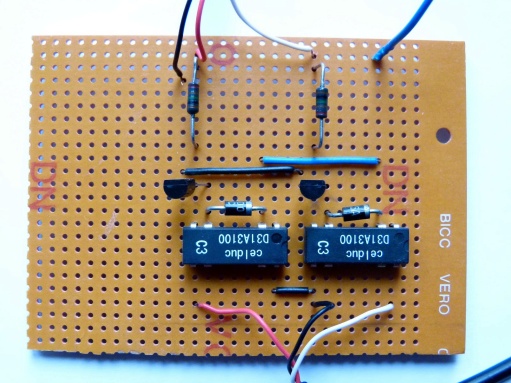
Une carte Veroboard reçoit les relais chargés de piloter l’appareil photo
Pour compléter l’ensemble, un hub USB, un écran 5 pouces (écran de recul de voiture) ainsi qu’un touchpad (en bas à gauche) seront connectés au Raspberry Pi. Un pack batterie alimente l’ensemble pendant plusieurs heures.
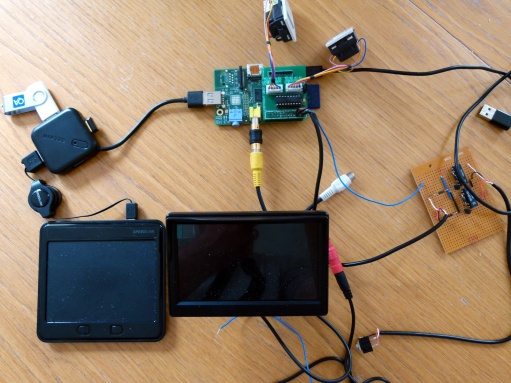
L’ensemble des circuits utilisés pour piloter la tête panoramique
Enfin, pour faire « plus propre », les divers composants sont montés dans un boîtier de contrôle, ce qui facilite le transport et la mise en œuvre de la tête panoramique GigaPi.
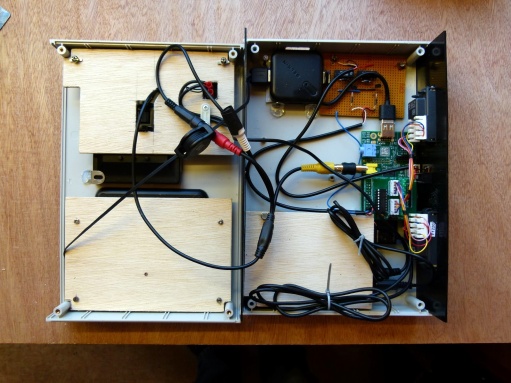
Le boîtier de commande de la tête GigaPi
Enfin, voici le fruit du travail de Tim et Jack.
La tête GigaPi en action
Les programmes sont bien entendu disponibles sur GitHub en téléchargement. Le Raspberry Pi a du travail pour faire fonctionner cette tête panoramique GigaPi :
- Prise en compte de la taille du capteur de l’appareil photo
- Prise en compte de la focale utilisée sur le zoom
- Calcul du nombre d’images en horizontal et vertical en tenant compte de ces paramètres et du taux de recouvrement nécessité par le programme de création de l’image finale
- Pilotage des 2 moteurs pas-à-pas (ordre des commandes, nombre de pas, timing des déplacements
- Mise au pont de l’appareil photo et exposition
- Déclenchement de l’appareil photo
Une belle réalisation et une utilisation intéressante du Raspberry Pi.
Références :
- http://www.raspberrypi.org/archives/3861
- http://www.gigapan.com/gigapans?query=timstocker
- https://github.com/Frankincense/GigaPi

Bonjour.
Quel bel article, je suis très content de l’avoir trouvé. En effet, je suis en train de travailler sur un projet perso à base de Raspberry Pi, de logiciels et et de script shell.
Programmes utilisés pour l’instant :
_ gphoto2 pour le pilotage de min reflex en USB
_ ufraw pour le développement de mes fichiers RAW
_ enfuse pour la fusion HDR des photos
Je réalise des visites virtuelles en tant que auto entrepreneur et j’ai eu l’idée que le Raspberry sur batterie m’aide à cette tâche pour me faire gagner énormément de temps. Je shoot toujours par tranche de 3 photos en faisant bracketing « exposition » pour assembler mon panorama avec des clichés en HDR. Donc après une mesure d’exposition par mes soins, mon script à pour but de :
_ Calculer les expositions en + et en – par rapport au paramètres d’expo que j’ai réglé
_ Prendre à la chaine les 3 photos de mon bracketing (ext, ext autant de fois que nécessaires en fonction du nombre de prises de vues nécessaires autour de ma tête panoramique sphérique)
_ Rapatriement au fur et à mesure des fichiers RAW en local dans le Raspberry
_ Développer les RAW
_ Fusion des HDR
Donc pour l’instant j’en suis à la fusion des HDR et ça fonctionne. Le processus de traitement de mes 21 images prend 10 bonnes minutes. Mon rêve est d’enchainer sur l’assemblage des HDR en Hugin automatiquement (via un modèle) puis de ré-enchainer immédiatement en convertissant l’assemblage du panorama pour mon viewer web de visite virtuelle (Pannellum). Enfin il me restera qu’a apprendre à appeler mon script avec un bouton poussoir par exemple. Hop, les photos seront dans la boite et le script continuera à travailler pendant que je serais encore sur la route pour rentrer à la base.
Cdt.
Bonjour
merci pour ce retour et les infos sur votre processus d’acquisition qui pourra donner des idées à d’autres RasPiNautes
Cordialement
François
Moi qui suit entrain d’acheter le matériel pour une telle réalisation je trouve dommage qu’il n’existe pas de « tuto » au moins concernant l’installation des fichiers car là je risque d’être perdu :/
Sans parler du fait que j’aimerais bien pouvoir me passer des écrans de contrôles et simplement modifier certains paramètres dans le code pour pouvoir modifier la vitesse des moteurs, etc..