

 Demain les voitures seront pilotées par des intelligences artificielles. Remarquez, quand on voit certains comportement d’humains au volant on regrette que ce ne soit pas déjà le cas 😀
Demain les voitures seront pilotées par des intelligences artificielles. Remarquez, quand on voit certains comportement d’humains au volant on regrette que ce ne soit pas déjà le cas 😀
Après les voitures ce sera le tour des motos et pourquoi pas des vélos…
En attendant, il faut explorer les possibilités offertes par la technologie dont nous disposons. C’est ce qu’a fait Eric, un étudiant de l’École Polytechnique Fédérale de Lausanne.
Au sommaire :
Moto radiocommandée pilotée par Raspberry Pi

L’annonce de départ
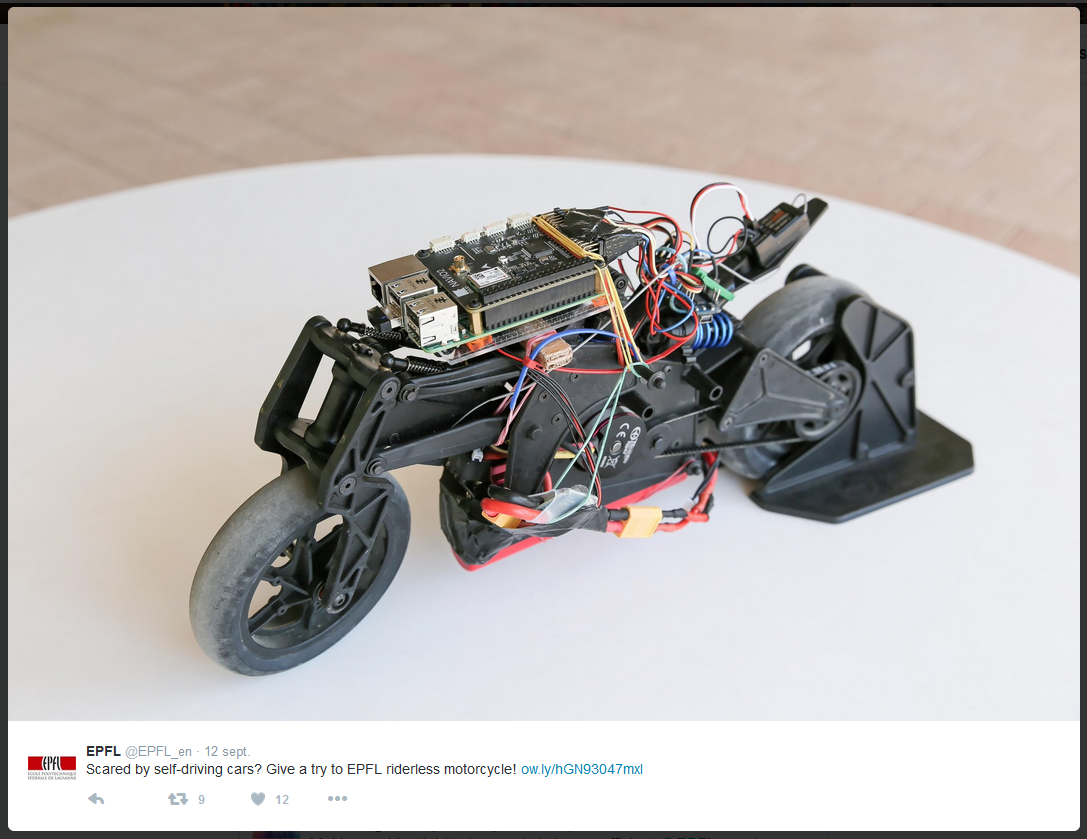
Twitt original de l’EPFL (École Polytechnique Fédérale de Lausanne)
C’est ce twitt qui est le point de départ de cet article, retwitté plusieurs fois sur Twitter, cette réalisation m’a été également rappelée sur Facebook par David 🙂 …
L’objectif de la réalisation
Après les courses de voitures électriques (la formule E), les combats ou les courses de robots, on peut envisager des courses de véhicules électriques autonomes qui seront pilotées par des intelligences artificielles. Eric imagine cette course en utilisant un modèle réduit de moto. Il voudrait battre un pilote humain pilotant une moto radiocommandée, avec une moto pilotée par un Raspberry Pi.
Comment ça marche ?
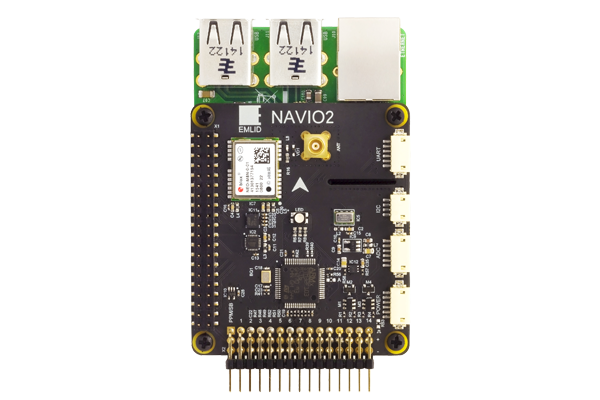
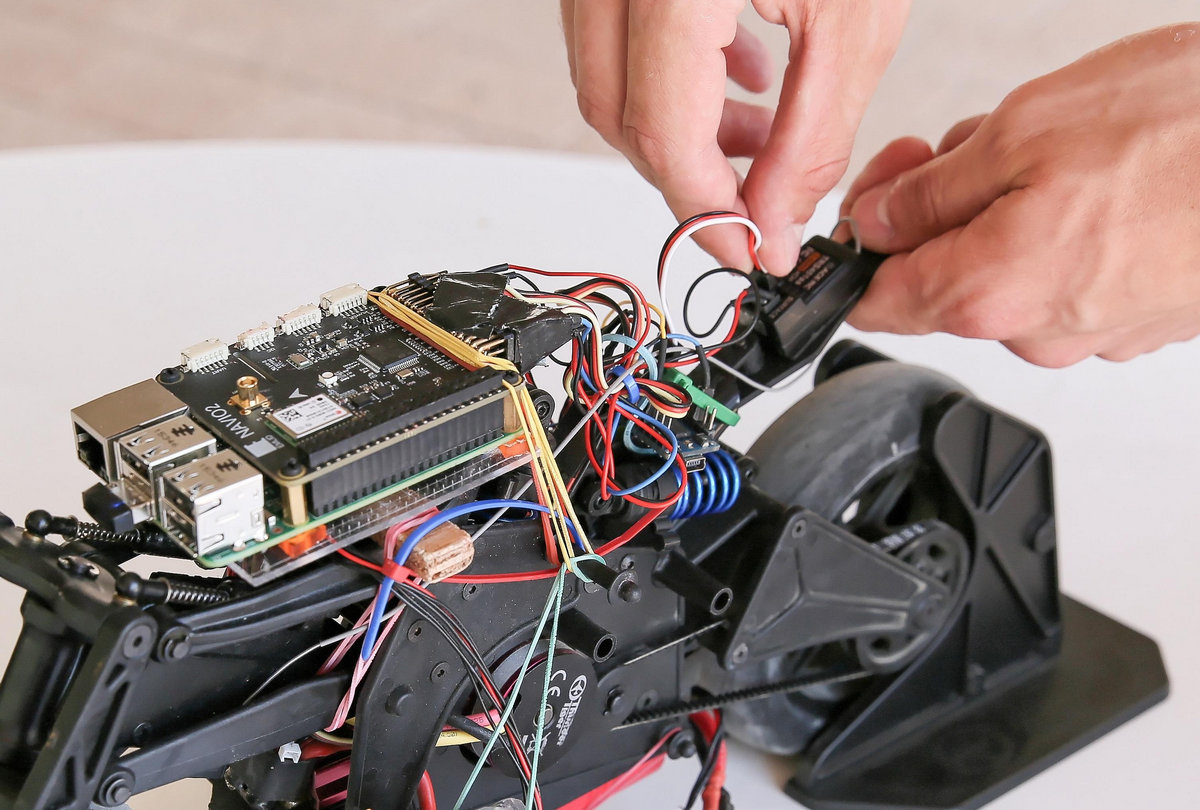
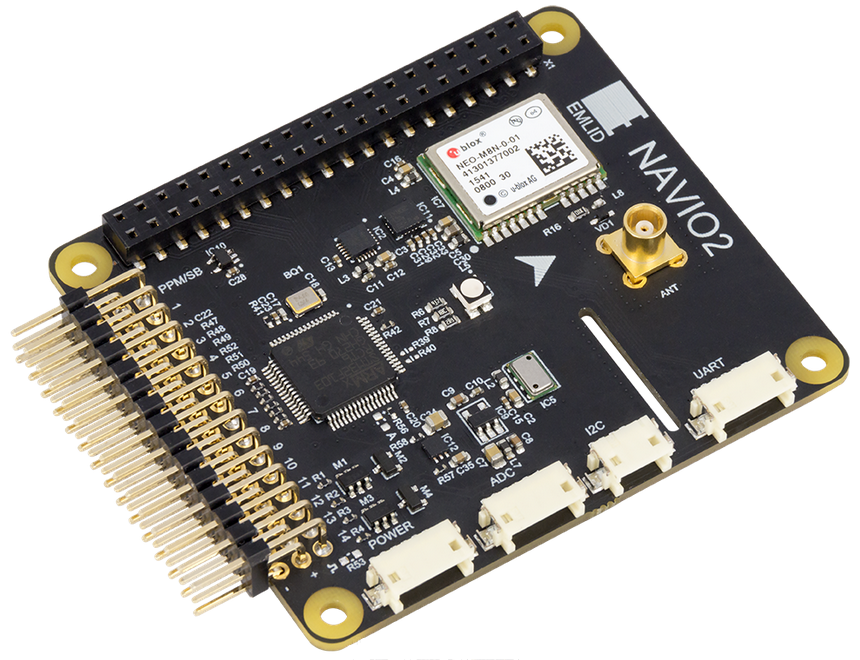 C’est une carte NAVIO2 qu’Eric a choisie comme co-pilote de la moto. La carte NAVIO comporte des capteurs qui permettent au logiciel de maintenir l’équilibre de la moto et de de contrôler sa direction. Dans l’état d’avancement du projet, il piloter la moto avec une radiocommande, mais à terme le but est qu’elle soit totalement autonome.
C’est une carte NAVIO2 qu’Eric a choisie comme co-pilote de la moto. La carte NAVIO comporte des capteurs qui permettent au logiciel de maintenir l’équilibre de la moto et de de contrôler sa direction. Dans l’état d’avancement du projet, il piloter la moto avec une radiocommande, mais à terme le but est qu’elle soit totalement autonome.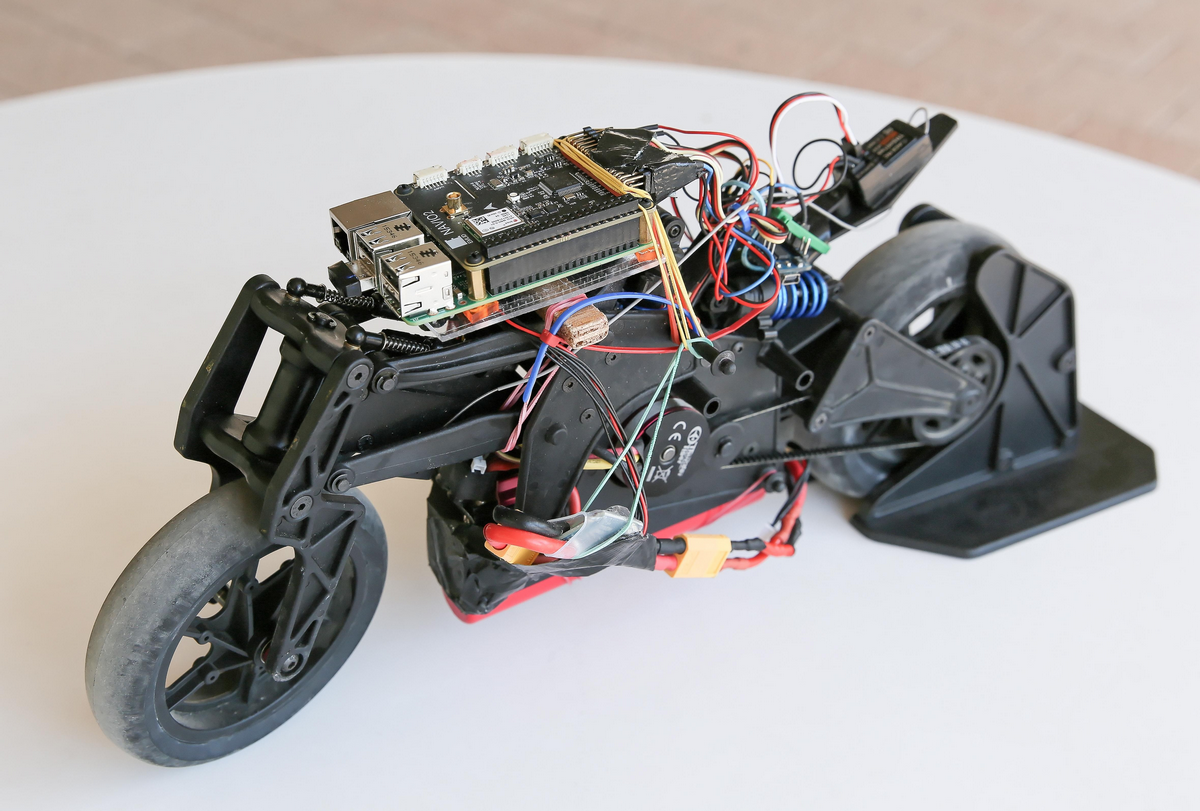
Avec ce genre de matériel, il devrait être possible à terme d’affronter des pilotes humains et même de les battre, comme AlphaGo a battu le champion du monde de Go en mars dernier. Mais bon, il y a encore de nombreux paramètres à gérer 🙂 Un pilote humain est imprévisible, parfois fourbe et il peut prendre des risques insensé sur une moto, surtout lorsqu’il la pilote… depuis une télécommande !
Il n’y a donc pas que l’équilibre et les trajectoires de la moto à gérer avec le Raspberry Pi, il faut aussi éviter les obstacles, les queues de poisson des concurrents, les poussettes, et autres joyeusetés qui se produisent sur une piste.
Le but est bien entendu de gagner sachant que la moto peut rouler à 60 Km/h, que la trajectoire idéale peut être occupée par un concurrent. Mais tout cela ne semble pas effrayer Eric !

Et après ?
J’imagine bien que comme sur les drones, les motos embarquent des caméras et retransmettent les images 🙂 Du « FPV » moto ? Ça ne vous dit pas ?
 Bon, si on va plus loin pourquoi ne pas imaginer un vélo autonome qui roule tout seul ? Non… ça c’est un peu trop tôt et juste le poisson d’avril 2016 de Google Pays-bas 🙂
Bon, si on va plus loin pourquoi ne pas imaginer un vélo autonome qui roule tout seul ? Non… ça c’est un peu trop tôt et juste le poisson d’avril 2016 de Google Pays-bas 🙂
Vidéo
Conclusion
Avec cette réalisation , Eric montre que les utilisations du Raspberry Pi sont vraiment variées et que la puissance de calcul d’un Raspberry Pi 3 est suffisante pour gérer des véhicules instables, comme une moto.
Sources
- http://www.minimachines.net/actu/moto-pi-radio-raspberry-pi-44319
- http://actu.epfl.ch/news/the-motorcycle-of-the-future-won-t-need-a-rider/
- https://emlid.com/

Très amusant !
je commence à réfléchir à faire un quadricoptère (sans parler encore de drone), j’ai vu passer des voitures, mais une moto, c’est une idée sympa !
fallait oser 🙂
I think using Navio2 with Raspberry pi 3 in drone research project is smart idea because of high computing potential of Rpi3 and Navio2 sensors.
thank you for comment Seimur 🙂
Le projet est vraiment intéressant pour le modélisme.
Les constructeurs de motos , du moins pour leur vaisseaux routiers comme Honda et sa Goldwing ou Bmw pour ses grosses routières travaillent déjà avec les capteurs pour l’ABS , anti-patinage et autres contrôle de trajectoires, et il est à parier que la stabilité contrôlée par calculateur est déjà sur la planche à dessin, sinon déjà proposée.